1. Propósito
El robot CoCube se puede utilizar junto con módulos externos para implementar funciones más complejas, y en esta sección se explica cómo programar el uso del módulo de agarre.
2. Materiales utilizados

3. Plataformas de software
MicroBlocks——CoCube y módulo CoCube
4. Programación
Conectar dispositivos: Conecta el IDE de MicroBlocks al robot CoCube por cable o de forma inalámbrica, y monta la pinza en el robot CoCube.
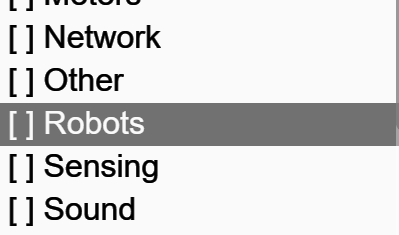
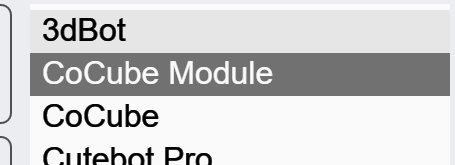
Cargar la biblioteca del módulo externo: Haz clic en el orden que se muestra para cargar la biblioteca "Módulo CoCube".
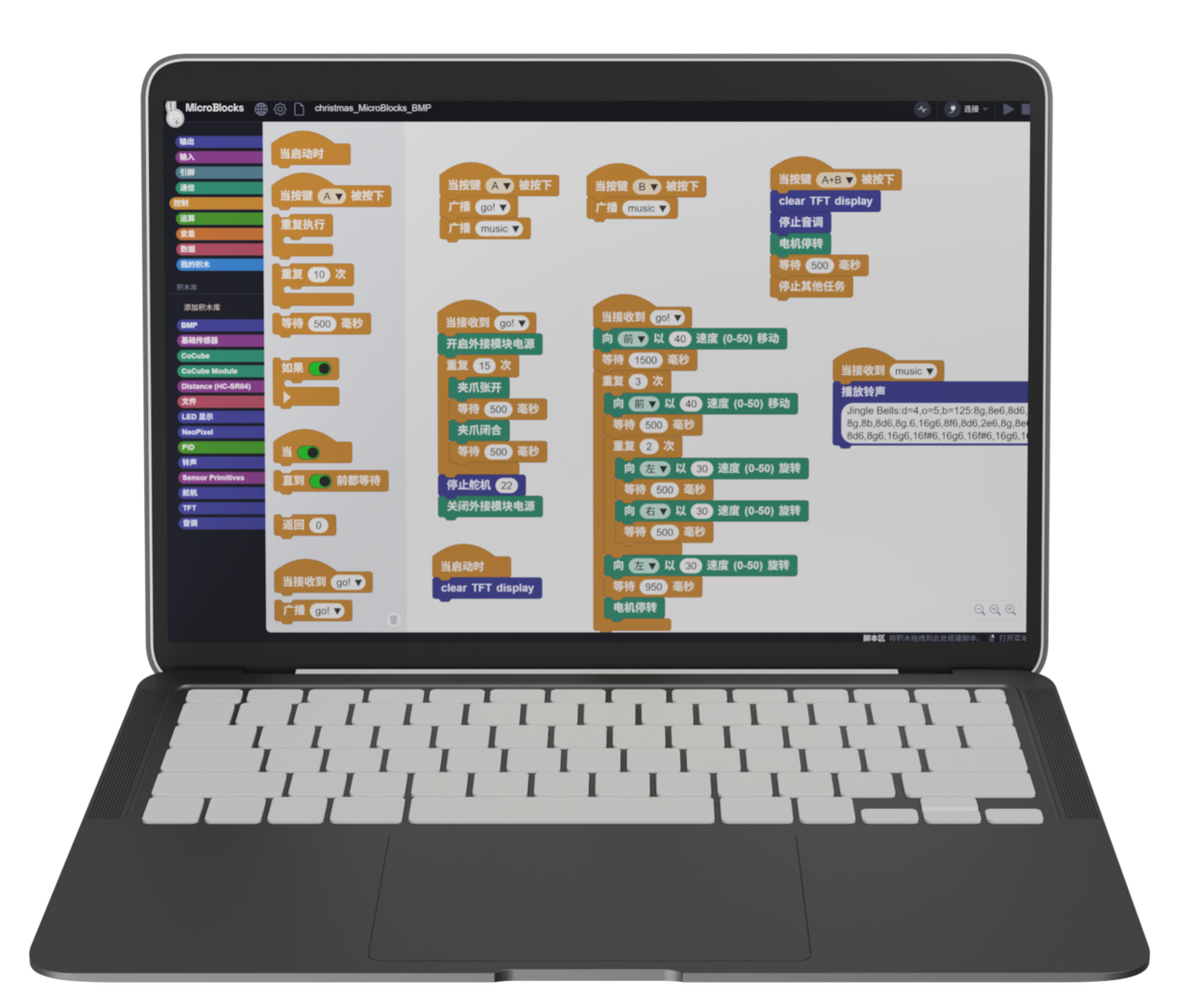
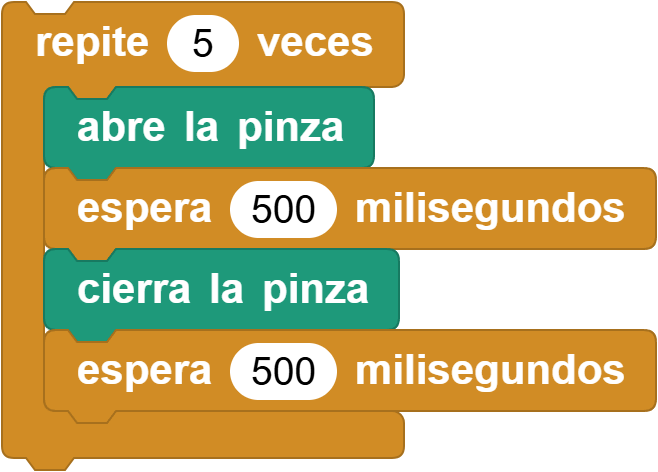
Encuentra los bloques de la pinza: Haz clic en la tarjeta "Módulo CoCube" de la biblioteca de bloques de la izquierda y arrastra los bloques "abre la pinza", "cierra la pinza" y "pon la pinza a _ (0 a 70) grados" al espacio de trabajo.
Ejecuta los bloques de la pinza: Haz clic en "abre la pinza" o "cierra la pinza". Cuando aparezca un halo verde alrededor del bloque, el programa se habrá ejecutado y podrás ver cómo la pinza se abre o se cierra. Escribe un ángulo de 0 a 70 en "pon la pinza a _ (0 a 70) grados" para moverla a ese ángulo.
5. Reto
Intente usar el módulo de agarre para recoger algunos objetos pequeños a su alrededor y lleve el pequeño cilindro de espuma en la caja de accesorios del punto C al punto E del mapa del laberinto.
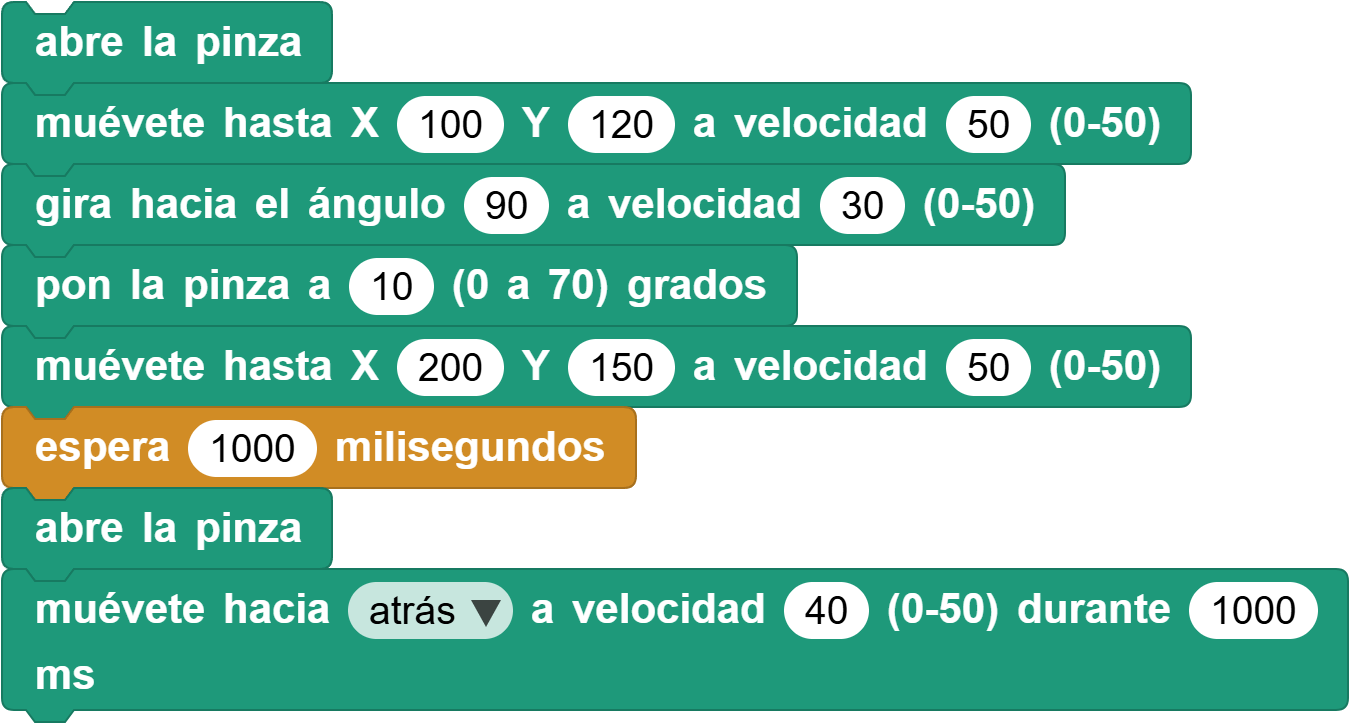
Programa de muestra de referencia: MicroBlocks-CoCube Case 05 Robots manipuladores