1. Propósito
Programe el robot CoCube para implementar las funciones básicas de movimiento del robot.
2. Materiales utilizados

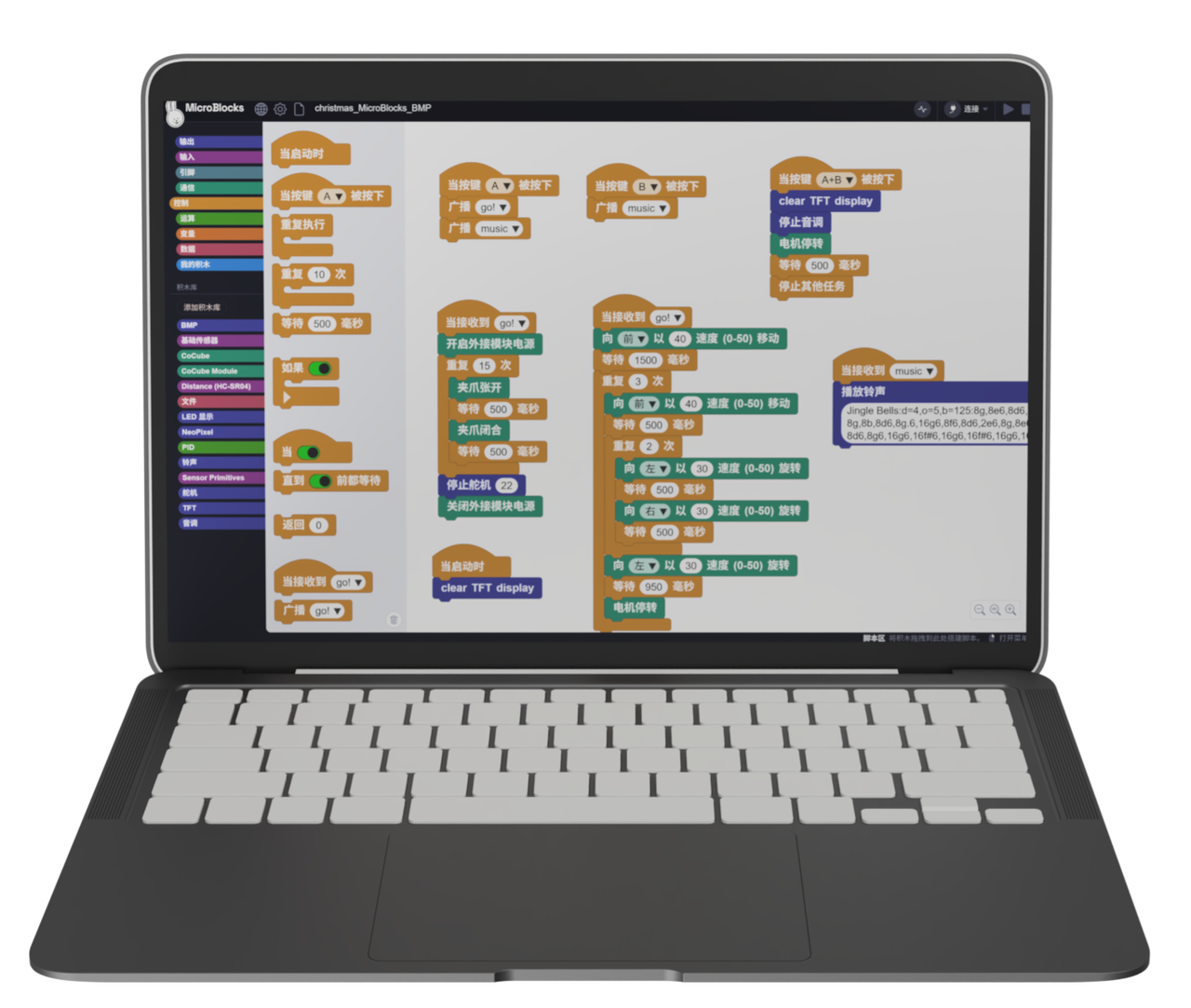
3. Plataformas de software
4. Programación
Control de movimiento CoCube
Conexión de dispositivos: Conecte el IDE de Microblocks al robot CoCube a través de Bluetooth.
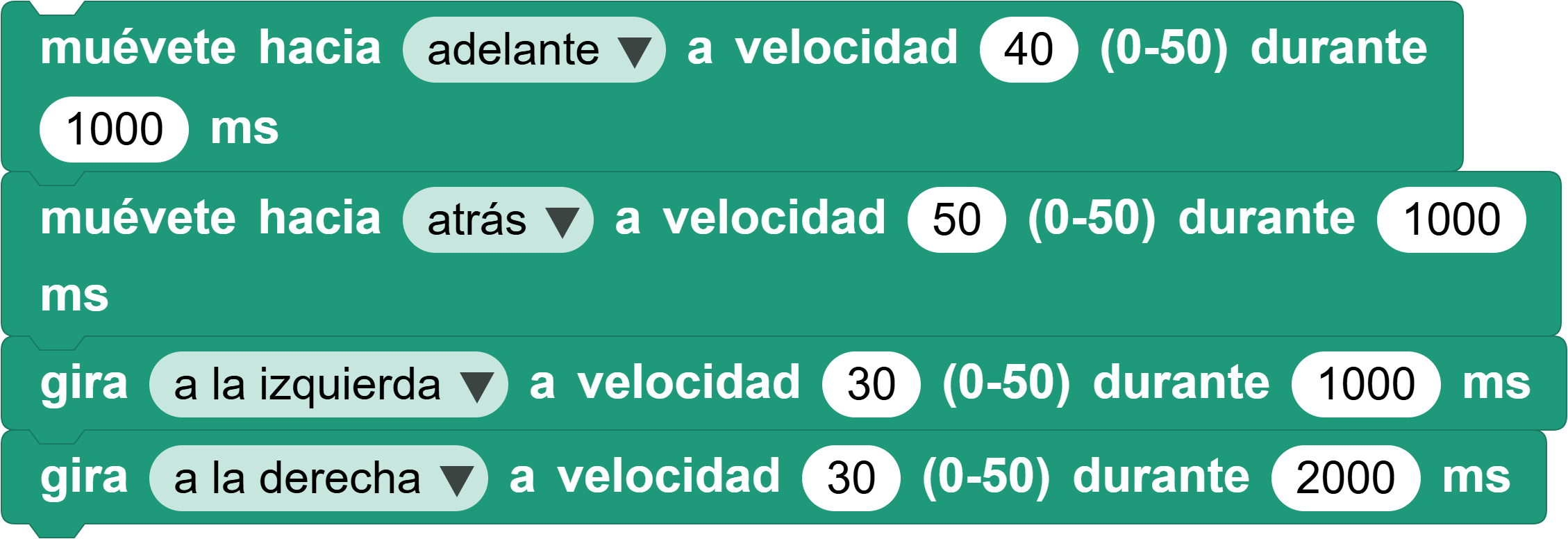
Controla el movimiento del robot: En la biblioteca "CoCube", arrastra los primeros bloques relacionados con el control de los motores. Estos bloques controlan la dirección, la velocidad y la duración del movimiento del robot CoCube.
- "frena las ruedas" y "detén las ruedas": Escribe el siguiente código para probar la diferencia entre los bloques "frena las ruedas" y "detén las ruedas". "frena las ruedas" detiene el robot de inmediato, mientras que "detén las ruedas" solo corta la alimentación de los motores, por lo que el robot CoCube seguirá deslizándose un poco hacia adelante por la inercia. En algunas tareas necesitarás elegir uno u otro bloque de parada.

- Control del robot para el "movimiento circular": El chasis del robot CoCube está diseñado en forma de pista. Al controlar la velocidad de las ruedas izquierda y derecha de manera diferente, puede simular más trayectorias de movimiento, como dejar que el robot CoCube gire en círculos.

Ejemplo de código de referencia: MicroBlocks——CoCube Caso 02 Control de movimiento básico
5. Reto
Utilice los bloques de construcción de control del motor para controlar el CoCube y completar el movimiento de la trayectoria cuadrada.
Puedes probar, ¿cuánto tiempo gira el robot hacia la izquierda a una velocidad de 30 y puede girar 90 grados con mayor precisión?
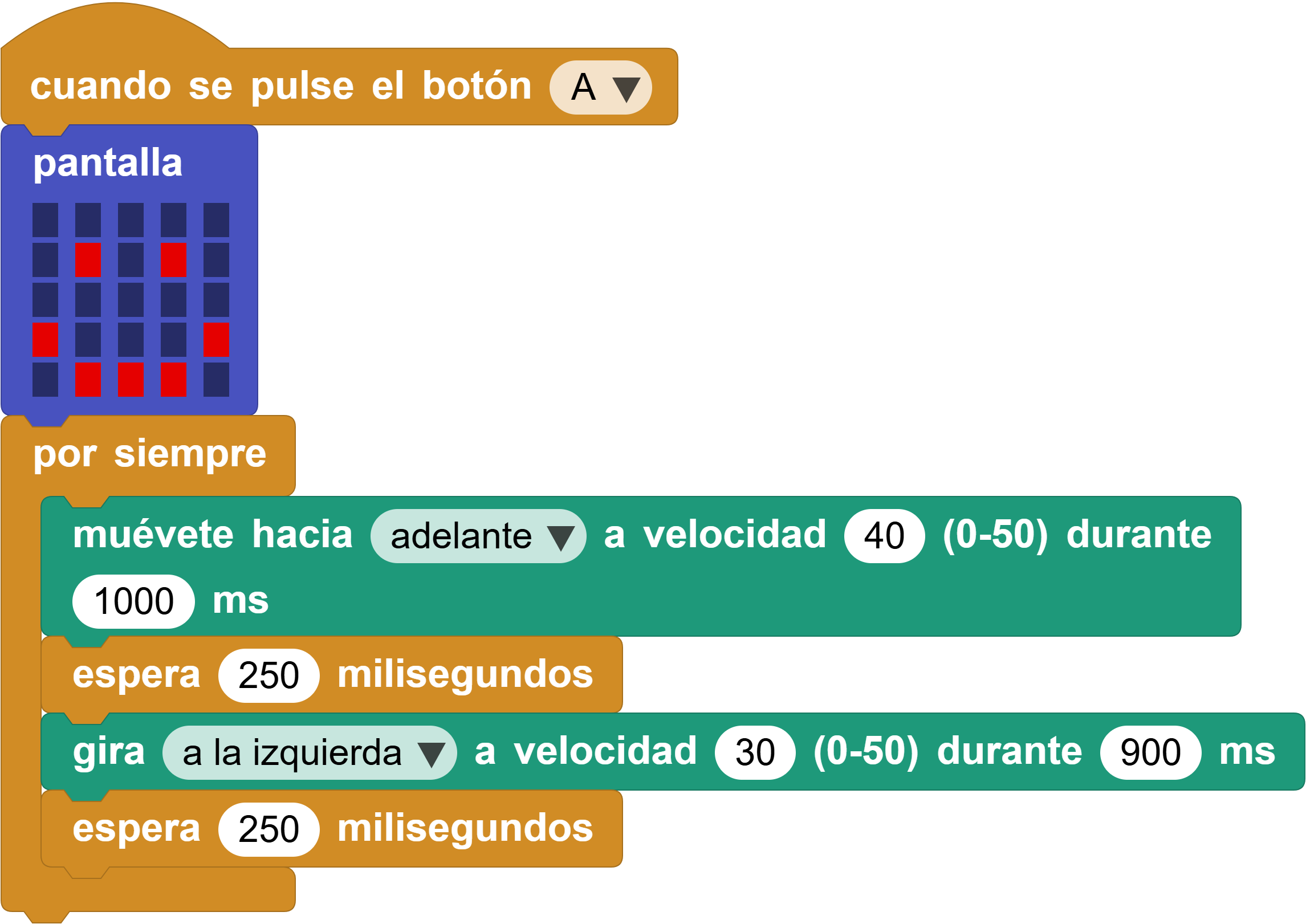
Ejemplo de código de referencia:
MicroBlocks——CoCube Caso 02 Movimiento de trayectoria cuadrada
Si eres observador, es posible que con el tiempo, el error acumulado por el CoCube girando a la izquierda se haga cada vez más grande, y la trayectoria del cuadrado se distorsionará gradualmente. ¿Cómo podemos conseguir movimientos más precisos?
En la siguiente sección, ¡aprendamos a usar la alfombrilla de posicionamiento juntos!