1. Propósito
Programe el robot CoCube para que aprenda la función de posicionamiento de coordenadas de la plataforma de posicionamiento y el movimiento direccional de punto fijo del robot, mientras aprende sobre la función de salida en MicroBlocks.
2. Materiales utilizados

3. Plataformas de software
4. Programación
4.1 Conoce el mapa de ubicación de CoMaps
CoMaps proporciona capacidades de posicionamiento precisas para los robots CoCube.
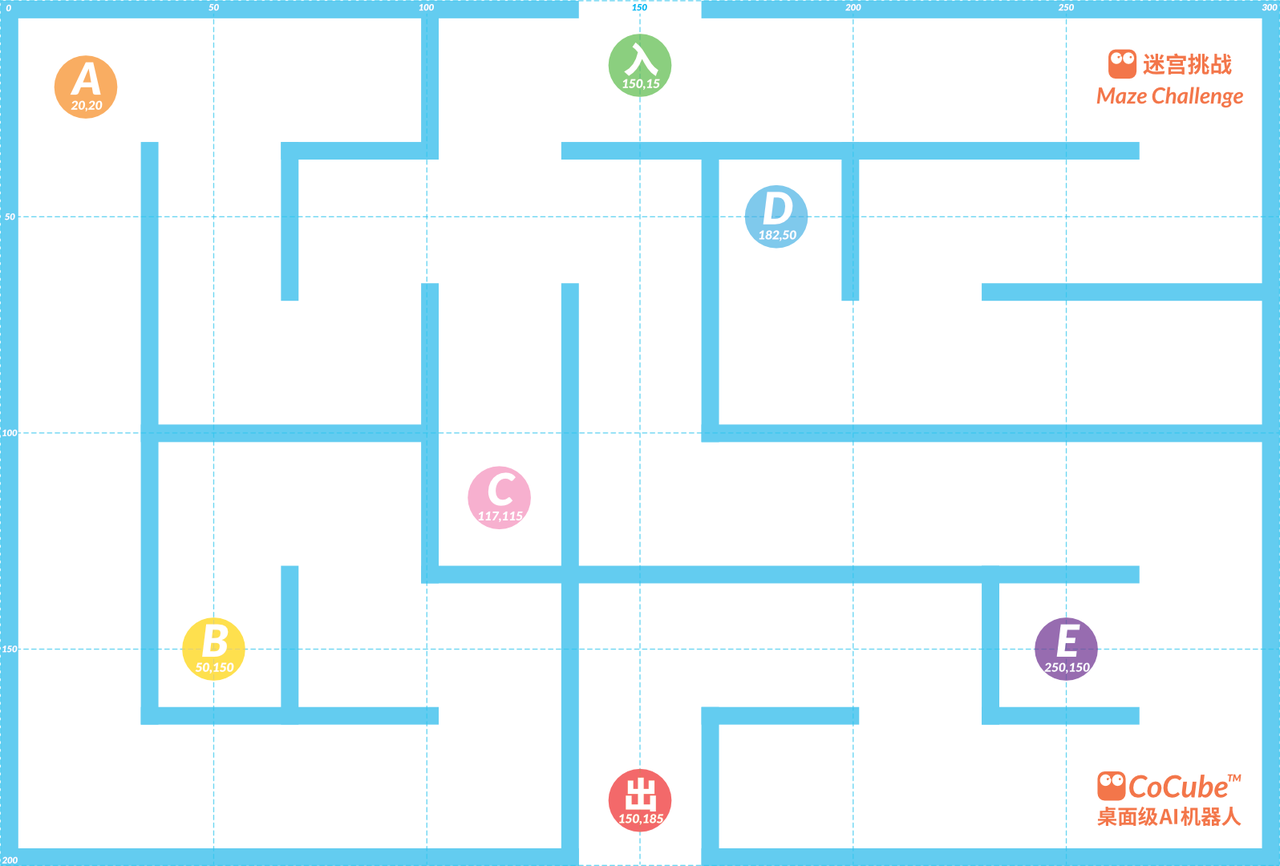
Saca un mapa de la ubicación temática del Maze Challenge y míralo más de cerca:
- Las coordenadas de la esquina superior izquierda del mapa son (0,0), las coordenadas de la esquina inferior derecha son (300,200), el eje X es de izquierda a derecha (0~300) y el eje Y es de arriba a abajo (0~200).
- El robot está 0 grados en la dirección positiva del eje Y y 180 grados cuando el robot está orientado hacia la dirección negativa del eje Y, y el ángulo de rotación en sentido contrario a las agujas del reloj aumenta.
- Hay líneas punteadas impresas en el mapa cada 50 unidades, lo que puede ayudar a localizar rápidamente la ubicación de las coordenadas.
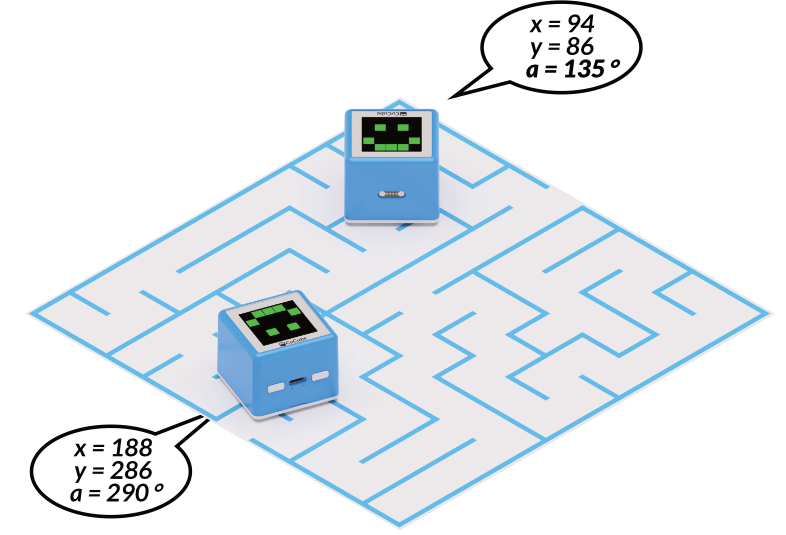
4.2 Deja que el CoCube diga dónde está
¿Cómo puedo obtener una posición y un ángulo más precisos del robot CoCube en el mapa de CoMaps?
Conecte el dispositivo: Conecte el IDE de Microblocks al robot CoCube a través de una conexión Bluetooth y coloque el robot CoCube en la plataforma de posicionamiento.
Usa el bloque "di _"
- Abre la categoría "Salida", arrastra el bloque "di 123" y haz clic para ejecutarlo. Verás una pequeña burbuja con "123" en la esquina superior derecha del bloque dentro del IDE de MicroBlocks.
- Eso es lo que hace el bloque "di _": no hace que CoCube hable de verdad, sino que muestra información en el IDE de MicroBlocks.
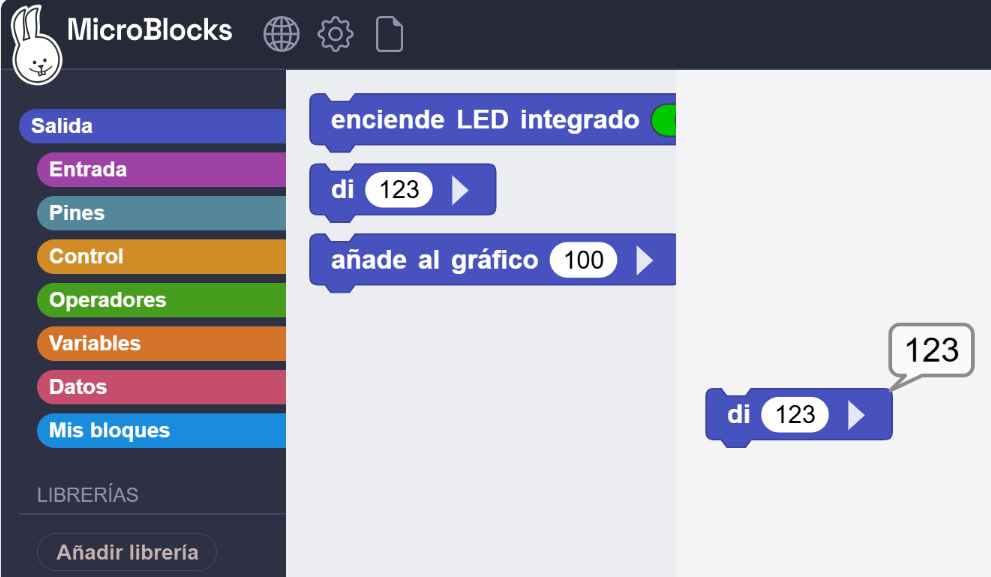
- Si quieres mostrar dos cosas al mismo tiempo, haz clic en el pequeño triángulo a la derecha del bloque "di _" y escribe el contenido en el nuevo campo de entrada.
- También puedes insertar bloques de la categoría "Operadores"; CoCube enviará el resultado final al IDE de MicroBlocks.

Salidas CoCube Coordenadas
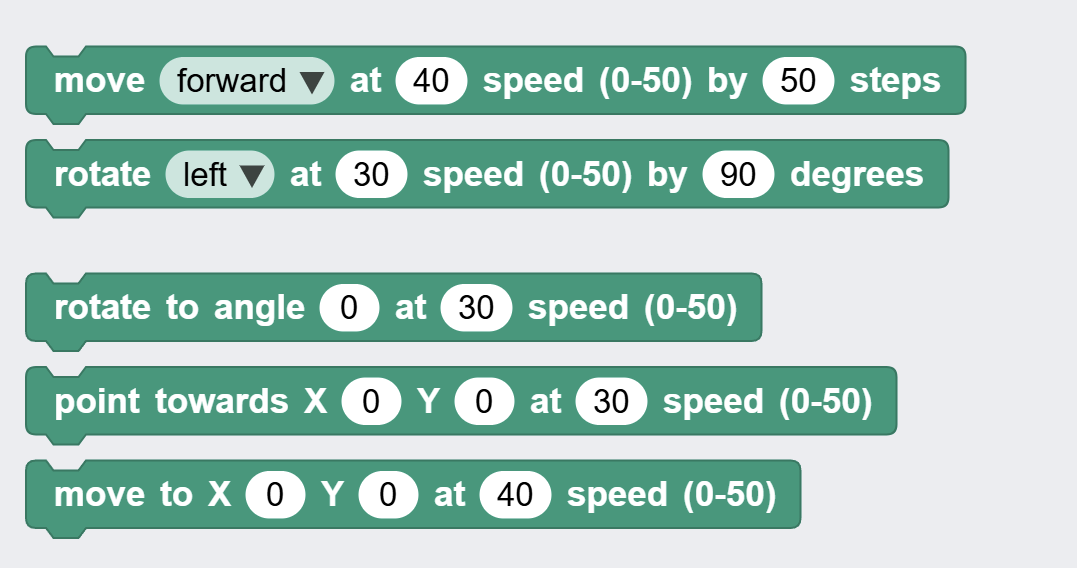
Arrastra los bloques "posición X", "posición Y" y "dirección" de la biblioteca CoCube y colócalos dentro del bloque "di _". Haz clic en el bloque para mostrar las coordenadas actuales de CoCube.
Para generar las coordenadas y los ángulos del CoCube en tiempo real, se puede anidar un bloque "repetido".
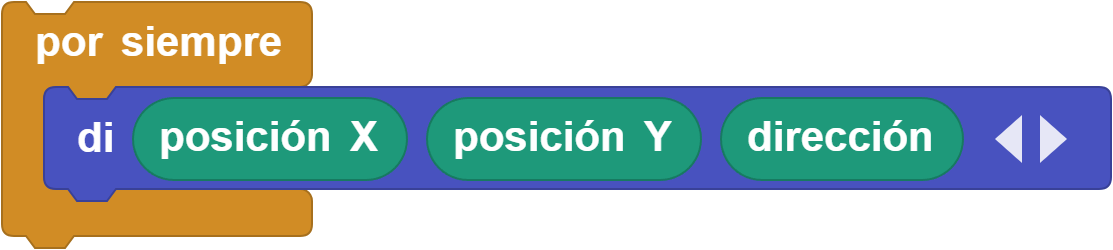
- Mueva el robot CoCube y vea si las coordenadas y los ángulos de los MicroBlocks cambian.
4.3 Lugares de dibujo CoCube
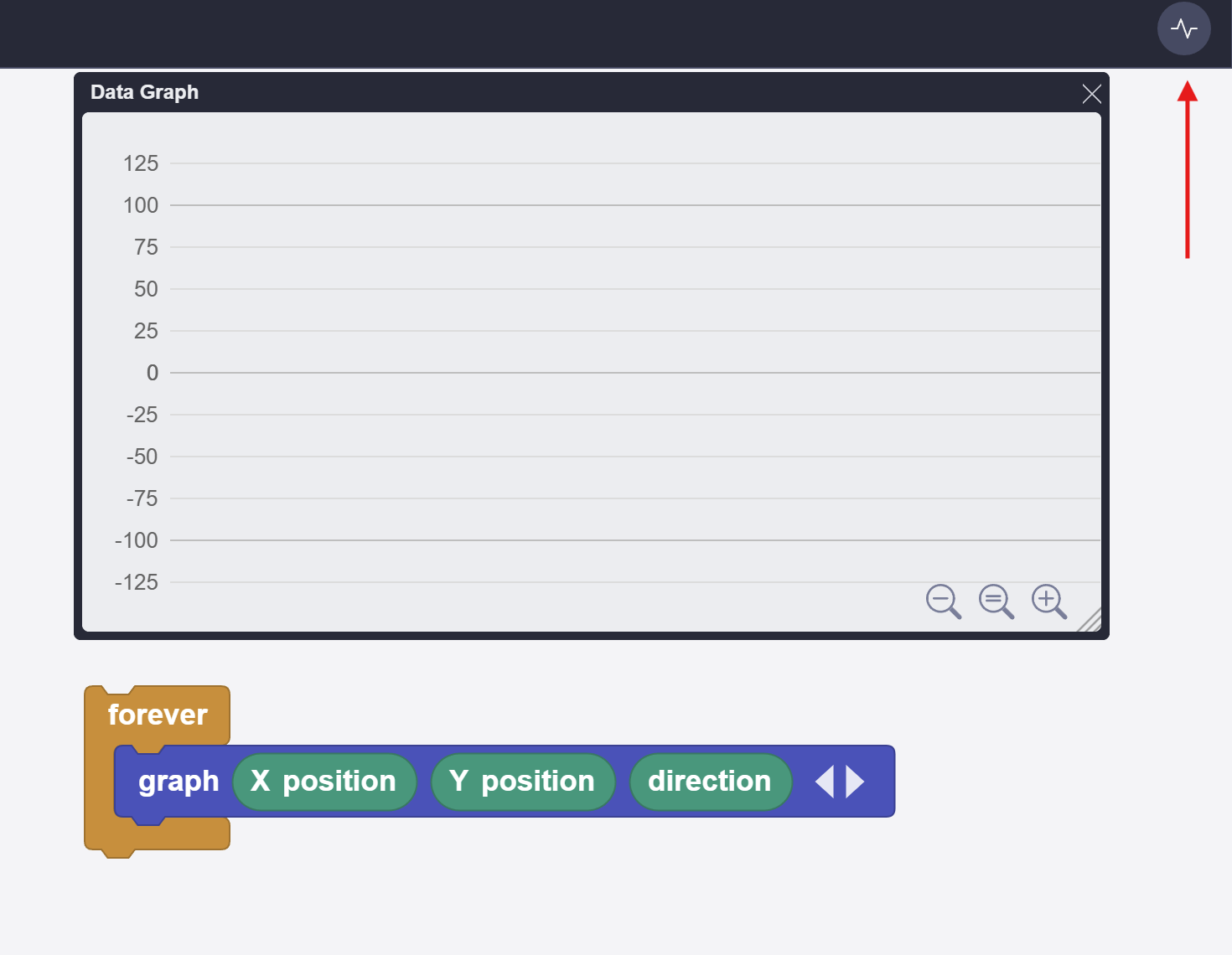
Si el bloque "di _" no es lo suficientemente visual, también puedes usar el bloque "añade al gráfico _" para mostrar las coordenadas de CoCube en un gráfico de datos.
Conecte el dispositivo: Conecte el IDE de Microblocks al robot CoCube a través de una conexión Bluetooth y coloque el robot CoCube en la plataforma de posicionamiento.
Usa el gráfico: Escribe y ejecuta el siguiente código. Luego haz clic en el icono de gráfico en la parte superior derecha del IDE de MicroBlocks. Las curvas roja, verde y azul representan los valores de "posición X", "posición Y" y "dirección" del robot CoCube.
4.4 Movimiento preciso
Una vez que hayas dominado los consejos anteriores, podrás explorar el resto por tu cuenta.
Vamos a reprogramar un robot CoCube para dibujar una trayectoria cuadrada:
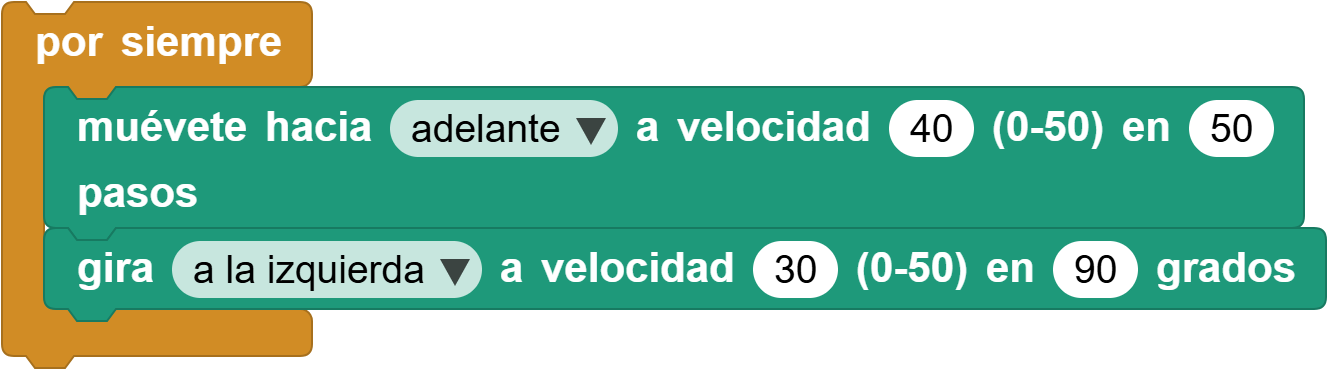
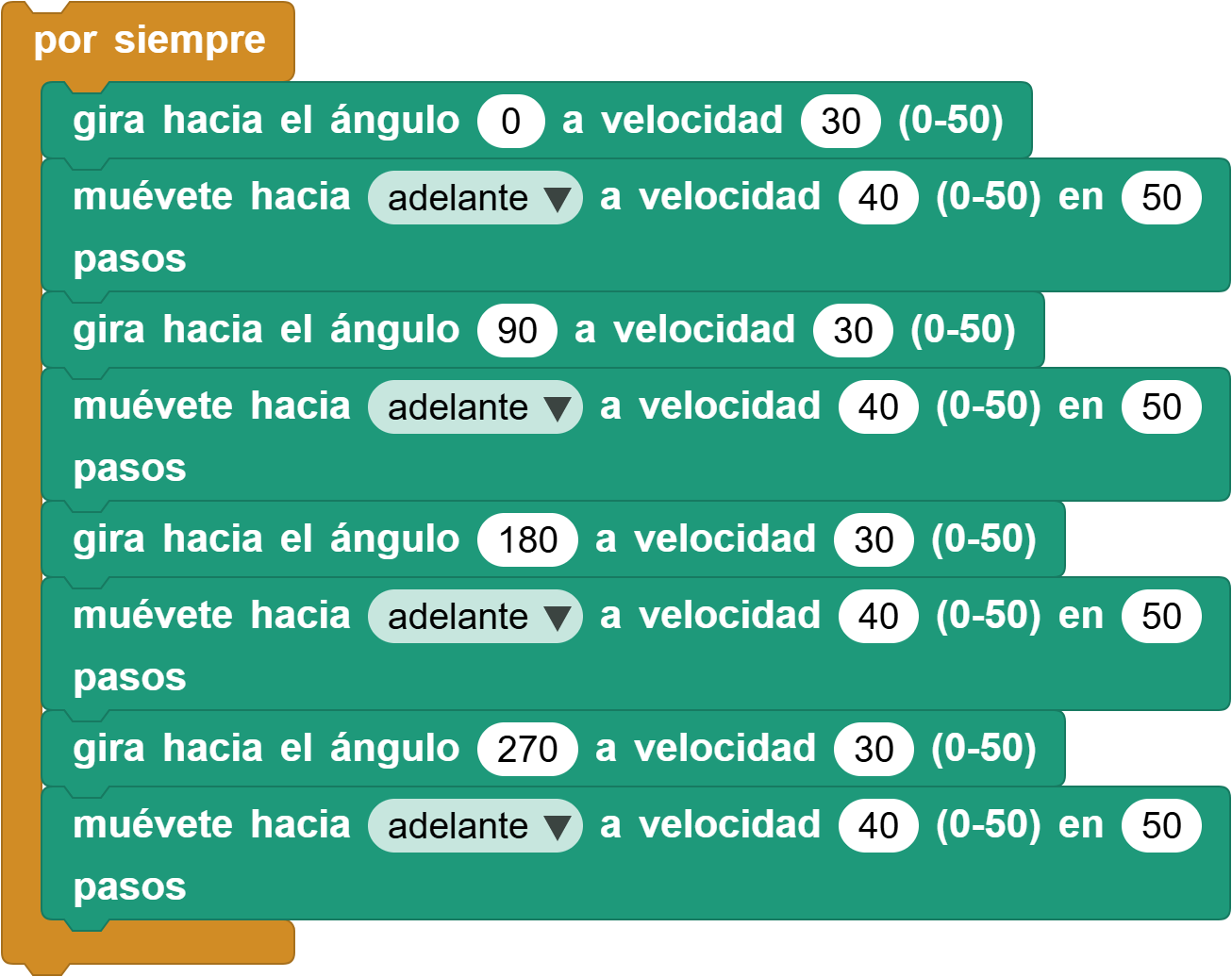
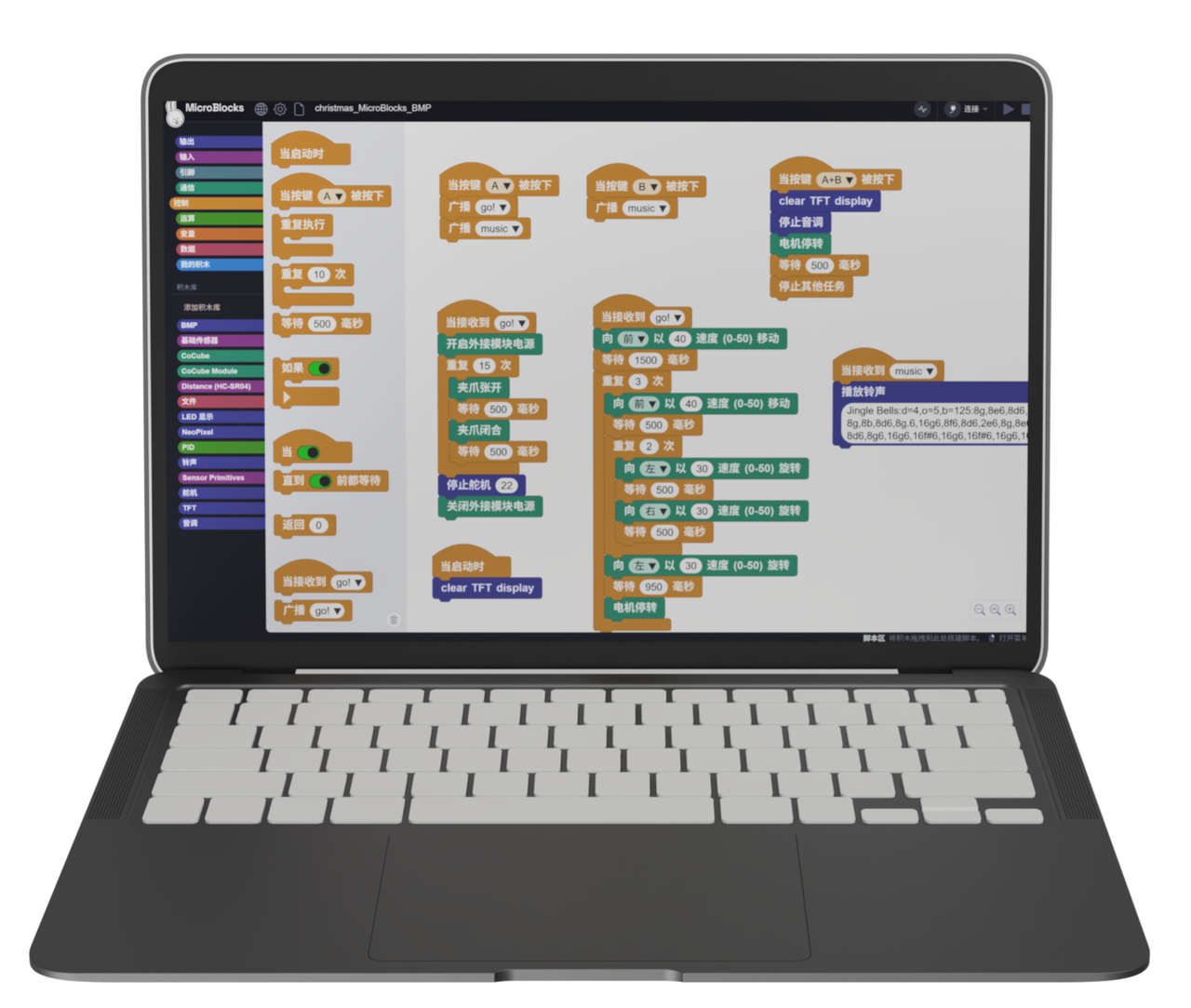
Ejemplo de programa de referencia: MicroBlocks - CoCube Case 03 Trayectoria de dibujo cuadrada
5. Reto
Utilice la función de retroalimentación de coordenadas y la función de movimiento de punto fijo de la plataforma de posicionamiento para caminar desde la entrada hasta la salida del laberinto.
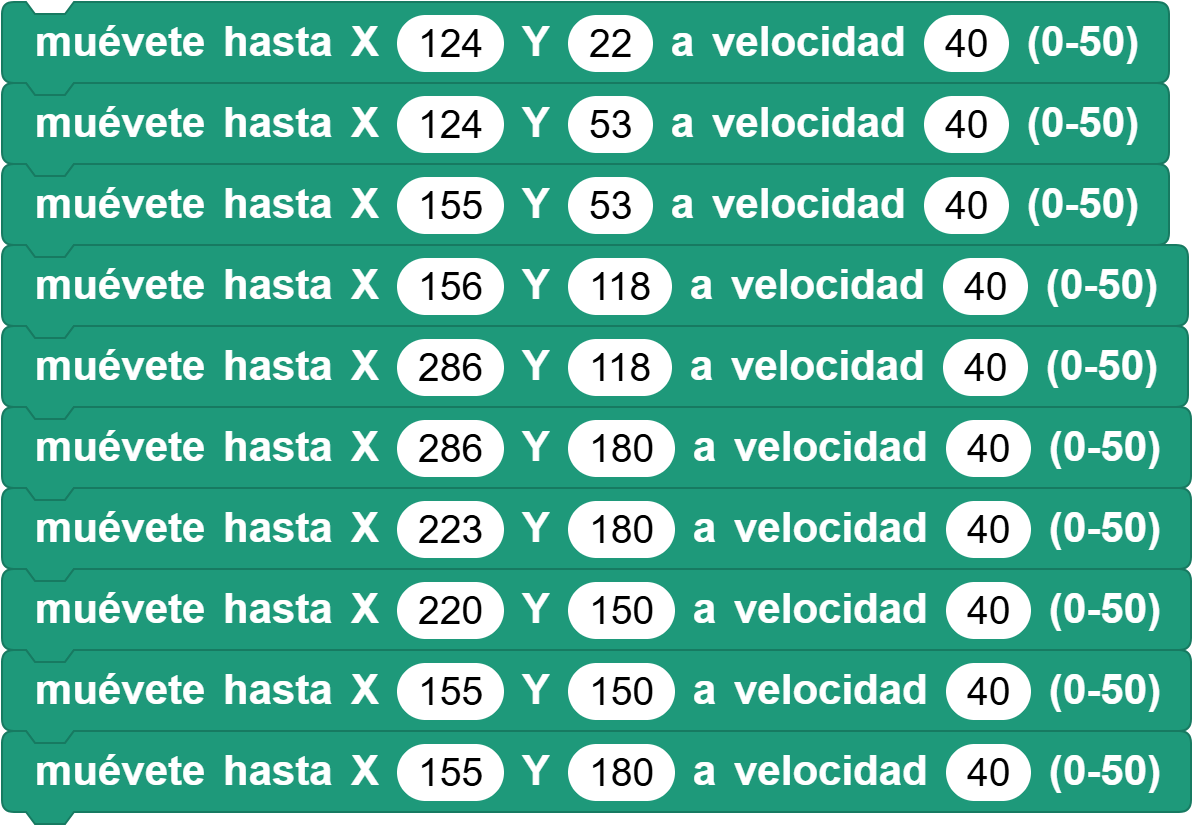
Programa de muestra de referencia: MicroBlocks--CoCube Case 03 Maze Challenge
Es posible que descubras que el CoCube es demasiado rápido y no lo suficientemente suave como para hacer giros, y podemos movernos a una velocidad más pequeña hacia un ángulo específico después de cada punto de coordenadas. ¡Pruébalo tú mismo!