1. Objetivo
Aprende la función de detección de bloques de color del módulo de percepción de visión IA y usa CoCube para reaccionar a diferentes bloques de color.
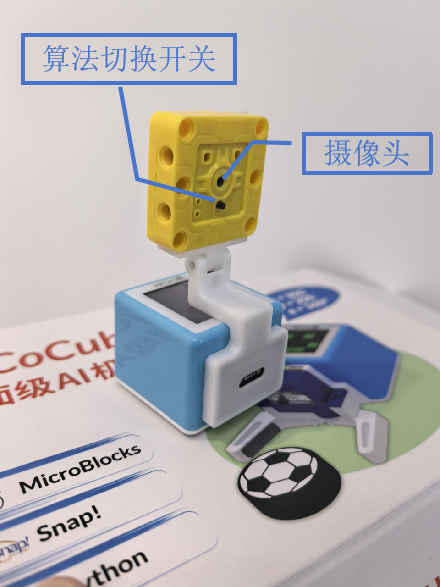
2. Materiales
3. Plataforma de Software
4. Conocimiento del Algoritmo
Tutorial de Referencia
Documentación: Introducción al Algoritmo — Detección de Bloques de Color (Blob)
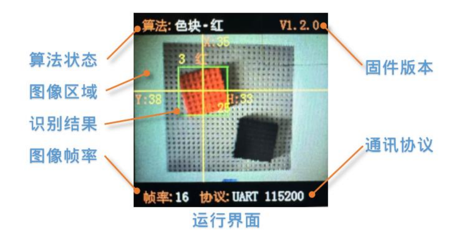
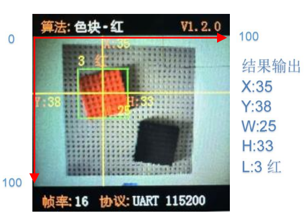
El estado de funcionamiento de la pantalla de Sengo1 se muestra a continuación. La pantalla se divide en 100 partes iguales horizontalmente (X) y verticalmente (Y). La esquina superior izquierda de la imagen de la cámara es el origen (0,0), la esquina inferior derecha es (100,100) y el centro es (50,50). Cuando se detecta un bloque de color correspondiente, devuelve su X, Y, W y H.
Descripción de los Bloques
- Bloque de Inicialización Sengo1
El bloque de inicialización debe ejecutarse antes de usar la cámara. Generalmente se coloca bajo el bloque de sombrero "al empezar".

- Bloque de Configuración de Modo Sengo1

- Configuración de Parámetros del Algoritmo de Detección de Color
Selecciona el color a detectar y el tamaño del área de reconocimiento.

- Lectura de Resultados de Bloques de Color Sengo1


Devuelve los resultados de detección del bloque de color, incluyendo la coordenada x del centro, la coordenada y del centro, el ancho (w) y el alto (h).
5. Programación
Conectar Dispositivo: Conecta el IDE de MicroBlocks al robot CoCube mediante una conexión por cable o inalámbrica, y acopla el módulo de visión IA en la parte frontal del robot CoCube.
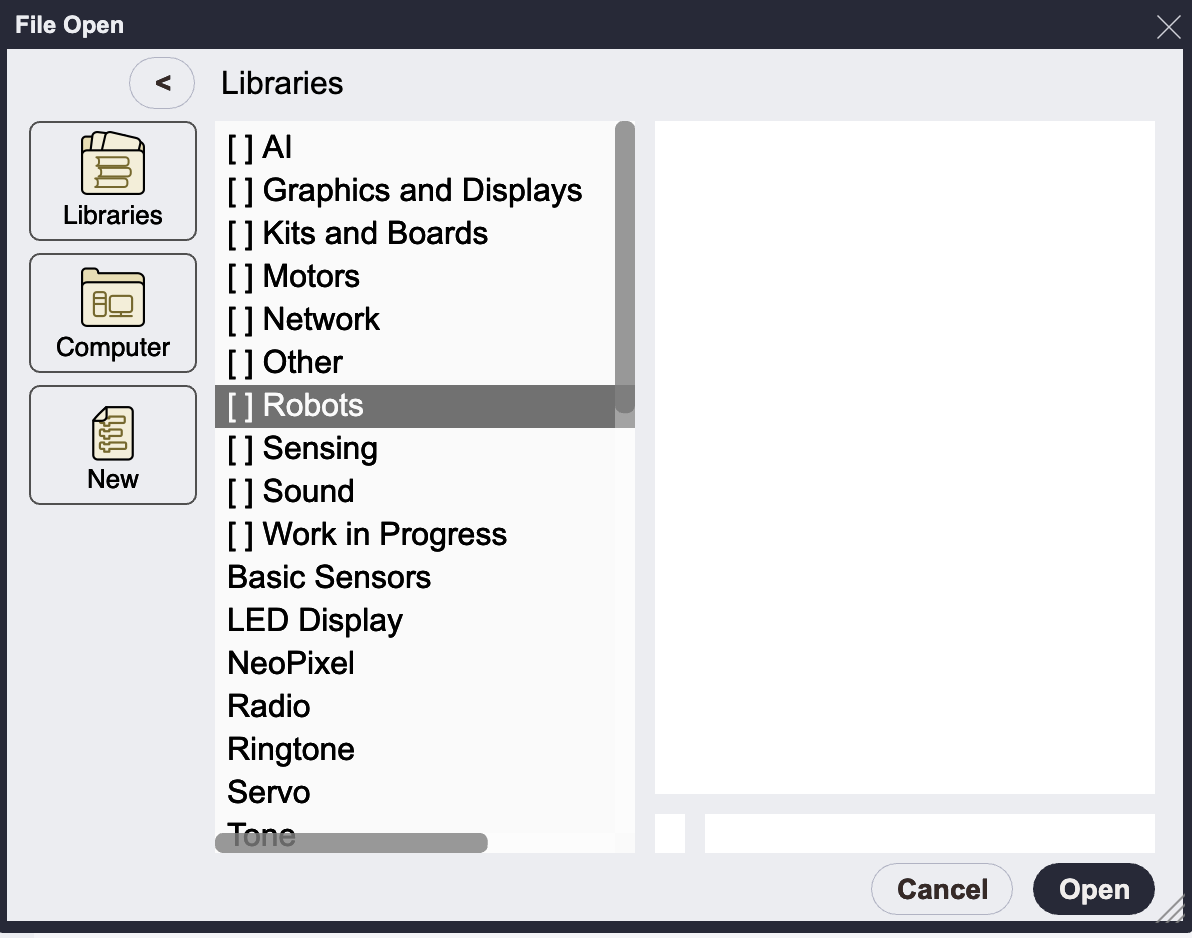
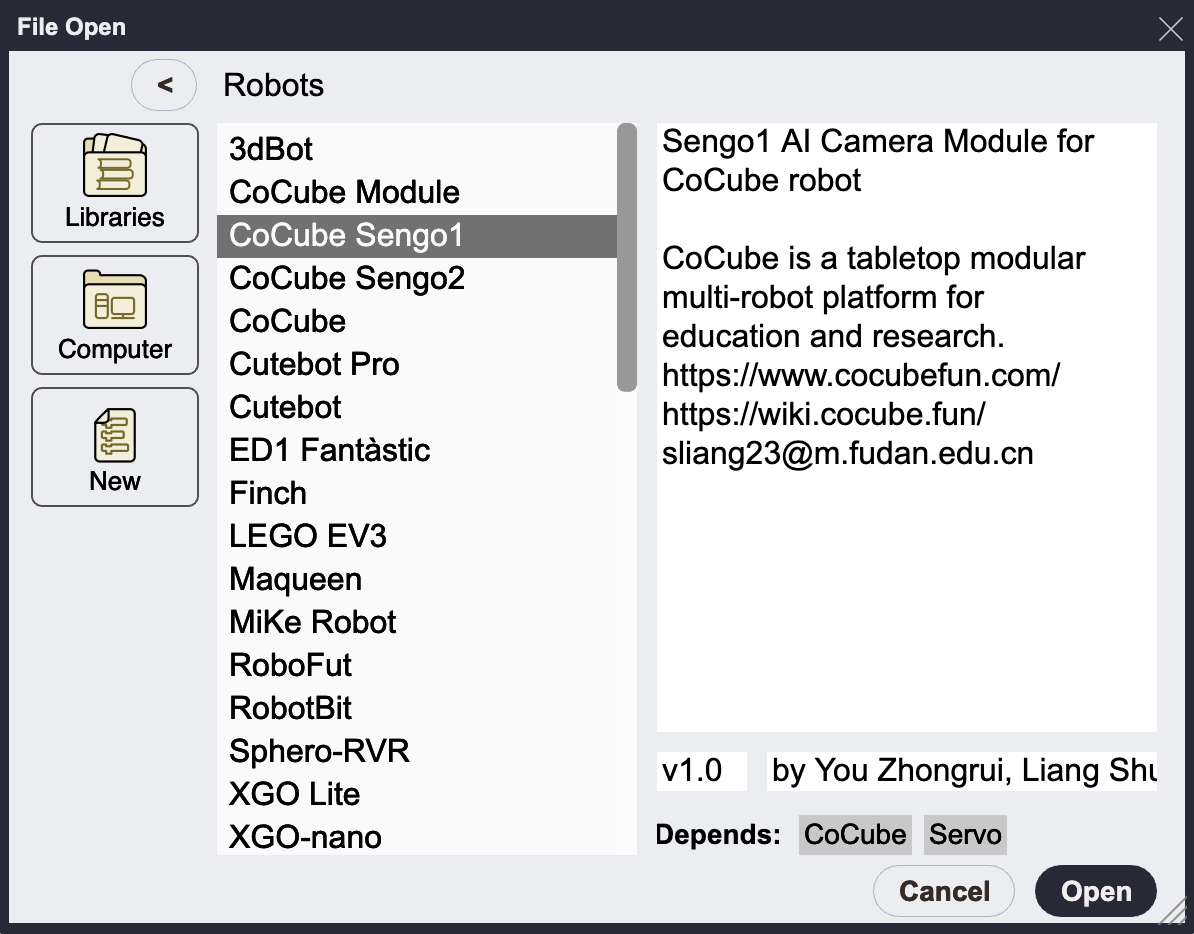
Cargar Librerías de Bloques: Añade "CoCube Sengo1" o "CoCube Sengo2" desde la librería del robot. La elección depende del modelo de hardware de la cámara; no hay una diferencia significativa en el uso. Sengo2 tiene más funciones. Este tutorial utiliza la librería Sengo1.
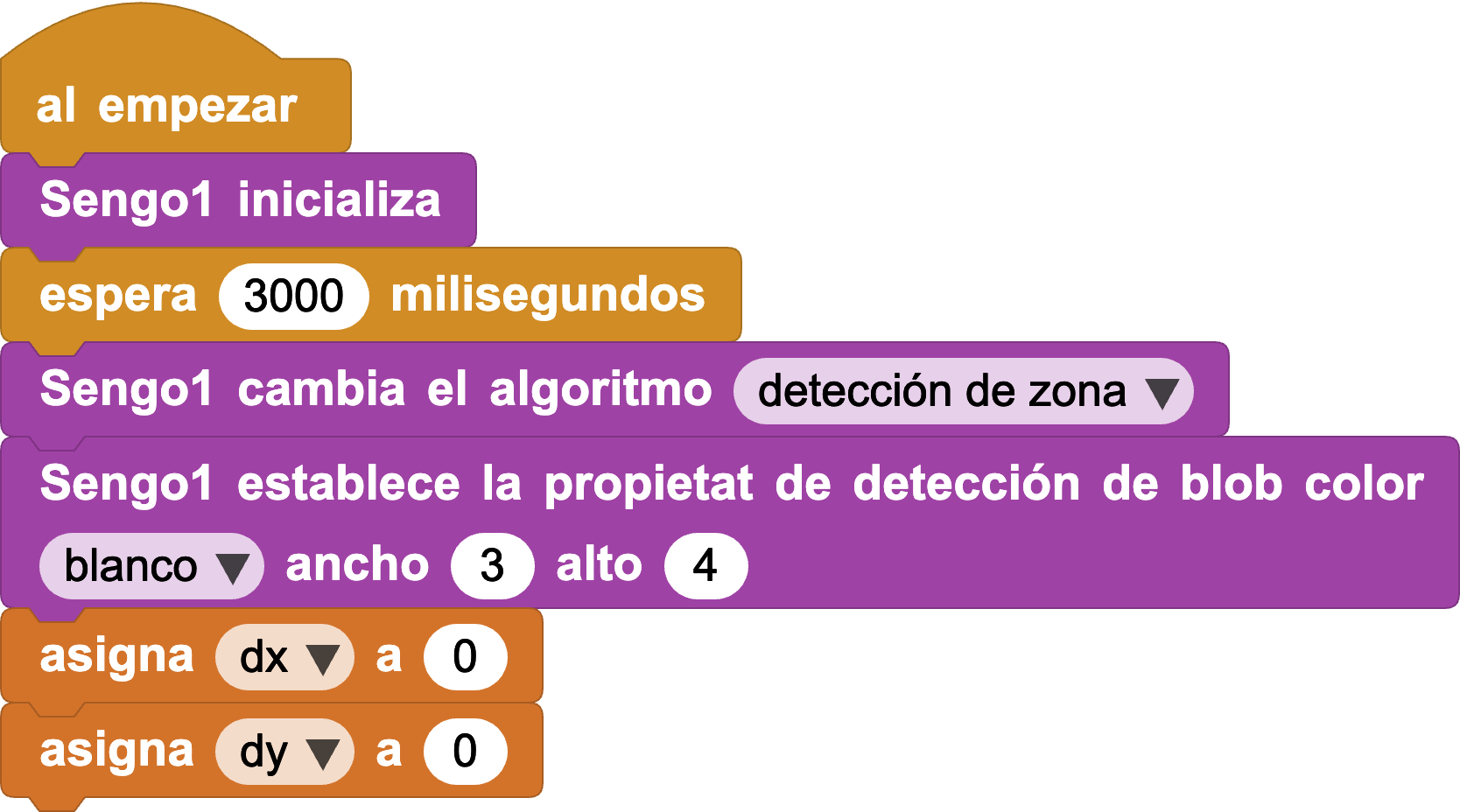
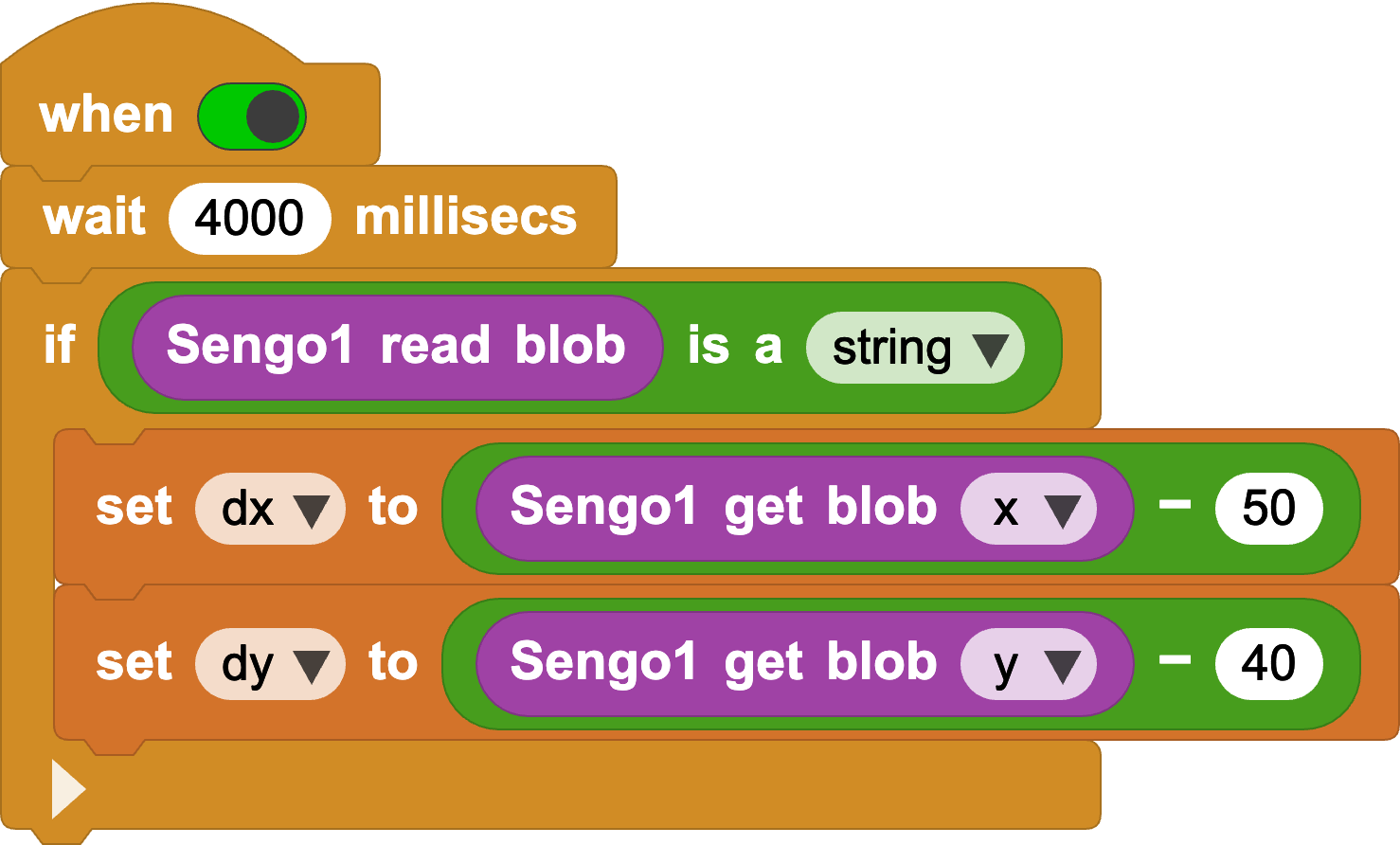
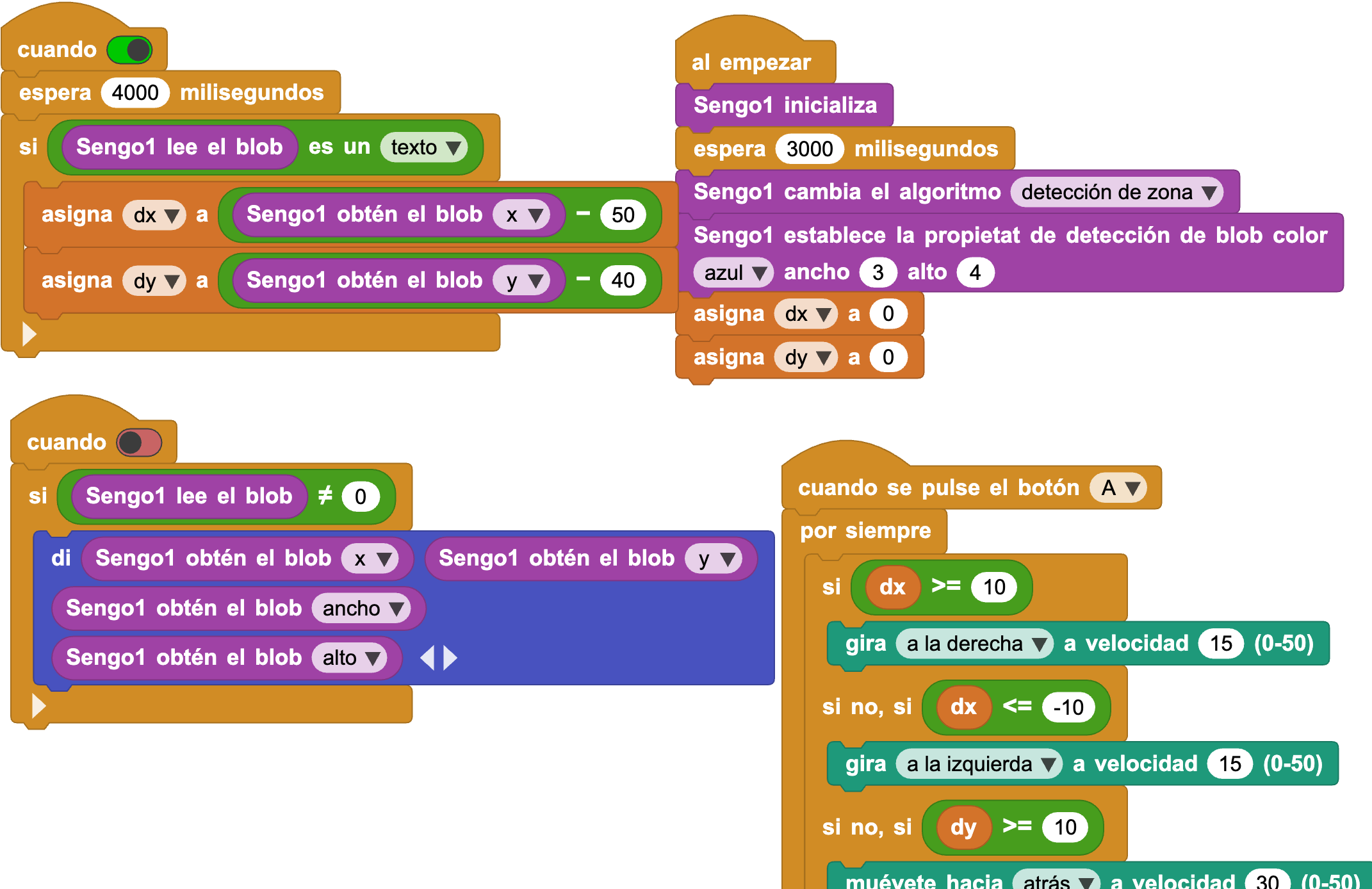
- Inicialización del Módulo de Cámara: Inicializa Sengo1 al arrancar. Establece el modo de algoritmo de la cámara en "Blob Detect" para el reconocimiento de colores. Inicializa las variables "dx" y "dy" a 0, que se usarán para juzgar la posición del bloque de color objetivo.
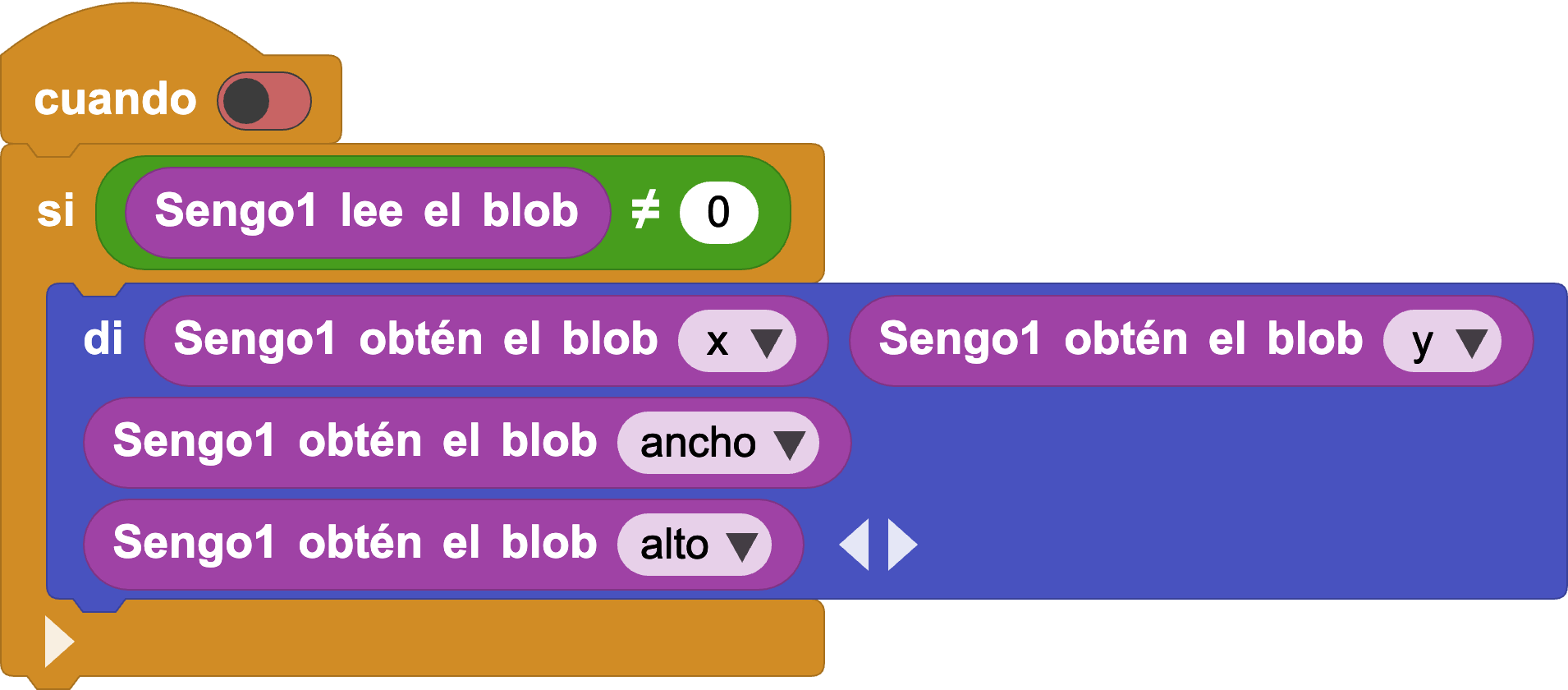
- Obtener Repetidamente la Posición del Bloque de Color: Usa el atributo "Sengo1 get blob" para observar las etiquetas de posición y tamaño cuando el bloque de color objetivo está en pantalla. Determina los parámetros del centro. Usa "dx" y "dy" para calcular la desviación del centro de la pantalla y decidir cómo debe ajustar CoCube su dirección y posición.
- Escribe tu Propio Programa: ¡Con el código de depuración anterior, intenta combinar más funciones!
6. Desafío
Basándote en la función de reconocimiento de colores, implementa una función para seguir un cilindro azul en movimiento.
Nota: Debes configurar manualmente los parámetros de reconocimiento de color para la cámara Sengo1, cambiando el color detectado del rojo predeterminado de fábrica a azul.
Código de Referencia: Caso: Sengo1 Detección de Color
Código de Referencia: Caso: Sengo2 Detección de Color