1. 原理介绍
在机器人世界里,寻迹模块就像是 CoCube 的“感光触角”。虽然它看不清远方,但对脚下的路却“明察秋毫”。
它的绝招叫 “红外线反射”:
发射与接收:模块每一路都有一对“眼睛”——红外发射管(打光)和接收管(收光)。
黑白分明:白色地面是反光镜,红外光射过去会反射回来,接收管:“收到信号!”;黑色轨道含有碳粉,是“光线黑洞”,红外光射过去就被吸走了,接收管:“没信号,这是黑线!”
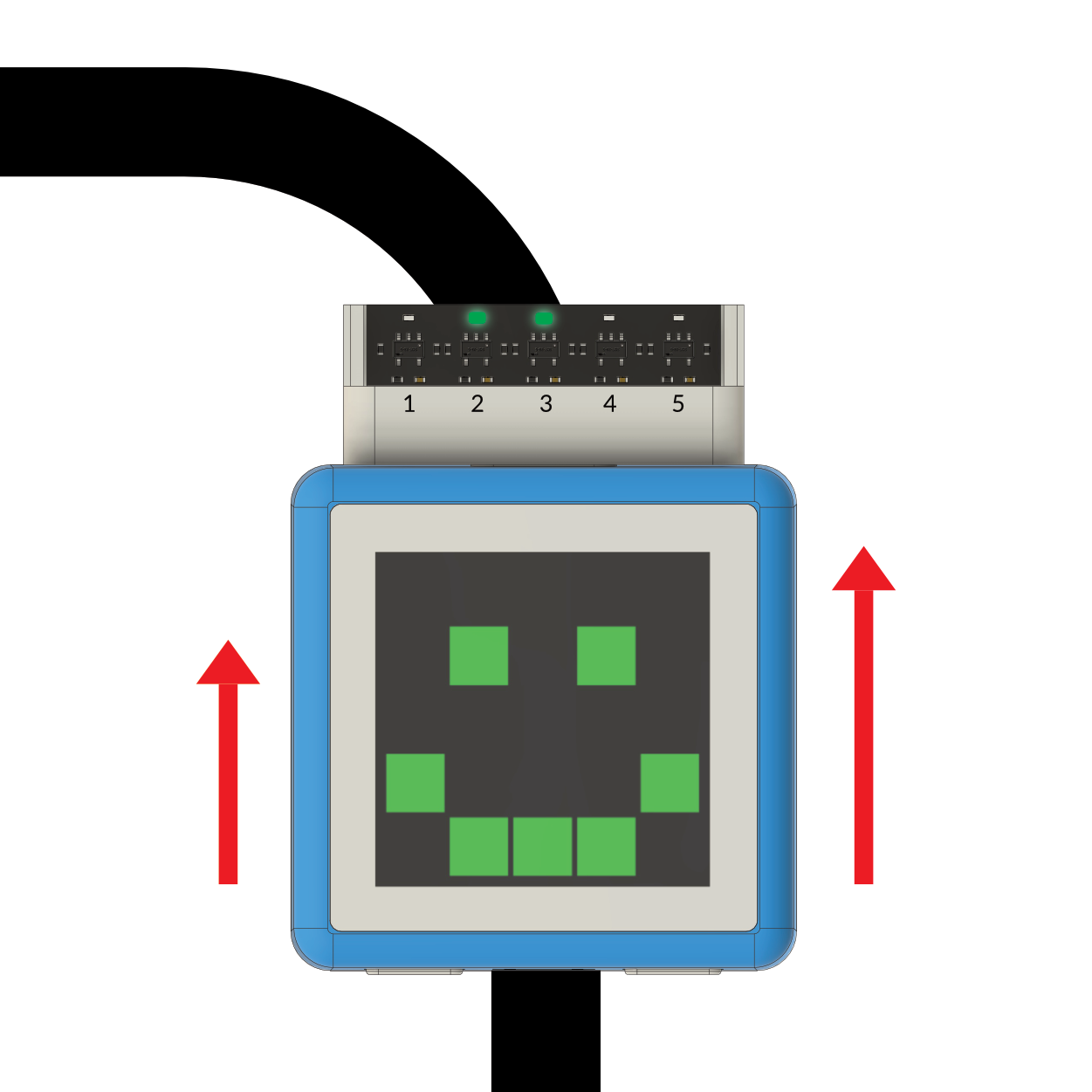
大脑决策:CoCube 通过判断 1 到 5 号探头谁“掉进了黑洞”,就能秒懂黑线在左还是在右,从而精准走位。
![]()
注意:笑脸朝向自己时,从左向右,依次是 1 到 5 号探头。
2. 准备工作
在让小车跑起来之前,我们先打印一张寻迹地图,再写一个简单的程序,把 5 路传感器的状态实时显示在 CoCube 的 LED 屏幕上。这样你可以直观地检查传感器是否正常。
打开“CoCube 外接模块”库,找准我们的寻迹专属积木。

打印寻迹地图
下载并打印 A4_track.pdf。建议使用哑光纸,避免反光干扰。
参考程序
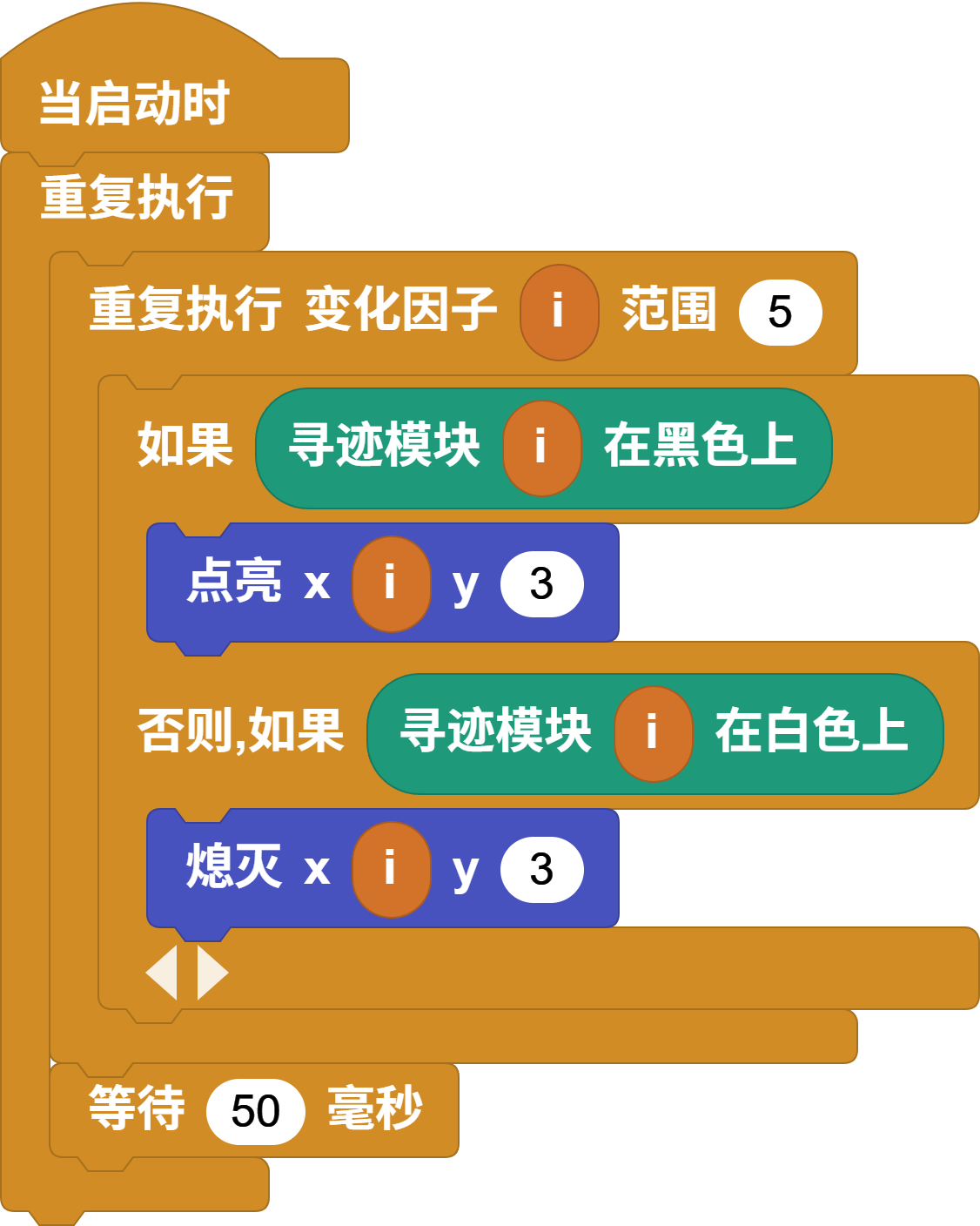
使用一个循环不断检测 1 到 5 号探头的状态。
如果探头在黑色上,就在 LED 屏幕对应的位置点亮一个像素点。
如果探头在白色上,就熄灭对应的像素点。
拿着车在地图上晃一晃,如果屏幕上的点紧跟着黑线走,说明你的“感光触角”状态满格!
3. 开发寻迹小车程序
有了“视觉”,下一步就是给 CoCube 机器人编写“行走逻辑”。
核心逻辑:修正偏差
寻迹的本质就是“哪边偏了往哪边拐”:
中间探头(3号)在黑线上:直行。
左边探头(1、2号)在黑线上:说明车往右偏了,需要左转(左轮减速,右轮加速)。
右边探头(4、5号)在黑线上:说明车往左偏了,需要右转(右轮减速,左轮加速)。
寻迹程序编写
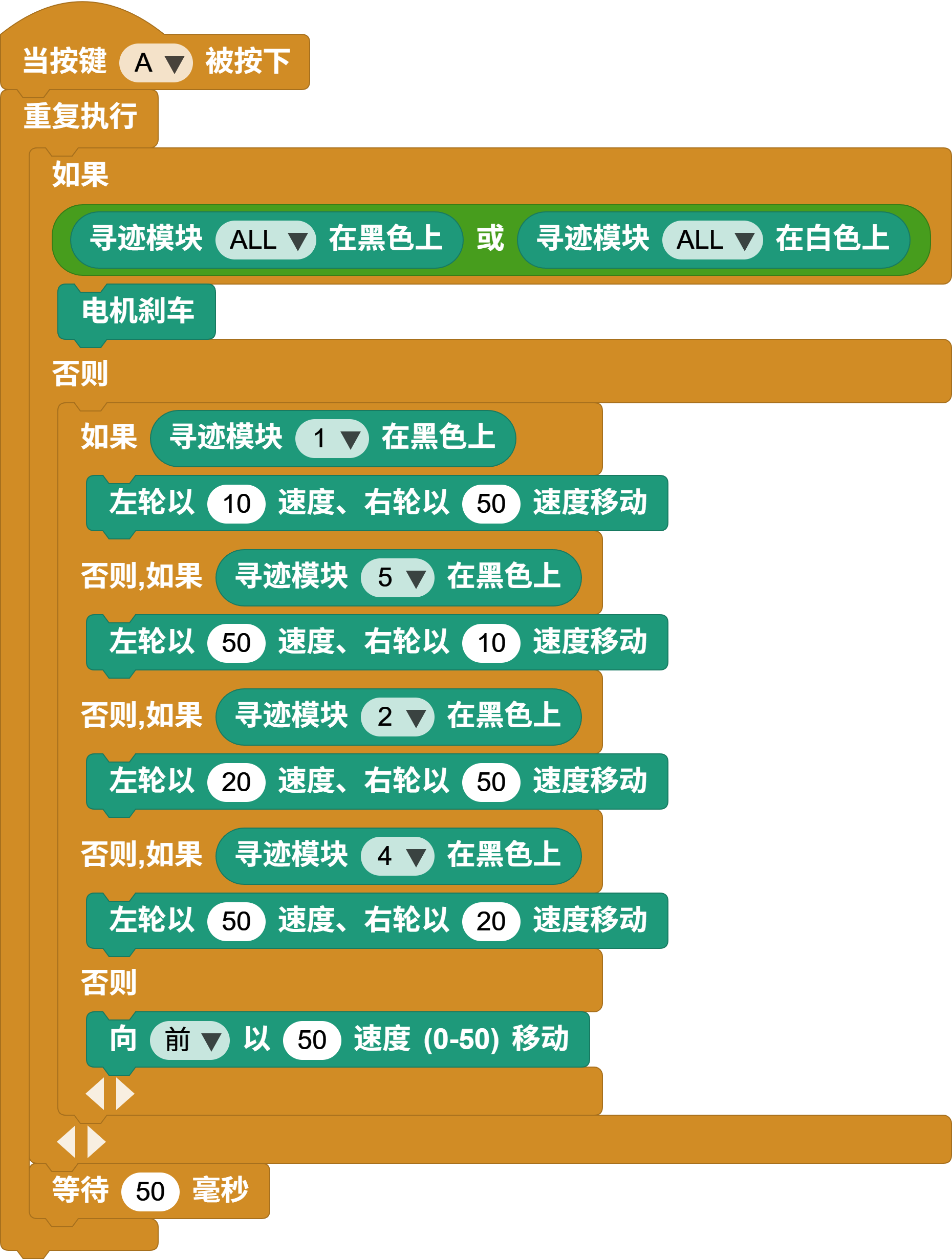
特殊情况:如果“ALL(全部)”都在黑线或白线上(例如冲出赛道或遇到横线),执行“电机刹车”。
大左转:当最左侧的 1号 探头检测到黑色时,左轮速度 10,右轮速度 50。
大右转:当最右侧的 5号 探头检测到黑色,左轮速度 50,右轮速度 10。
小左转:当左侧的 2号 探头检测到黑色时,左轮速度 20,右轮速度 50。
小右转:当最右侧的 4号 探头检测到黑色时,左轮速度 50,右轮速度 20。
默认直行:如果以上都不是(通常是中间在黑线上),则两轮均以 50 的速度前进。
4. 深度思考:逻辑顺序的秘密
在程序中,你会发现我们是先判断 1 号和 5 号(外侧),再判断 2 号和 4 号(内侧)。
思考一下:如果把这个顺序反过来,程序会发生什么?
(提示:程序是从上往下执行的,如果 1 号踩线了,它也可能触发了 2 号踩线的条件。先处理“最极端”的情况,才能保证小车不脱轨!)
5. 挑战与创作
完成圆角矩形后,不妨再打印这些地图试试吧!
当面对直角转弯时,应当怎么修改程序,才能完美寻迹呢?

晒出你的跑圈视频吧!