1. 案例目的
学习 AI 视觉感知模块的线条检测功能,并用 CoCube 实现自动巡线功能
2. 使用材料
巡线地图,可下载并用A3纸印刷
3. 软件平台
4. 算法知识
参考教程
文档教程:算法介绍 — 线条检测 Line
需要使用到的积木说明
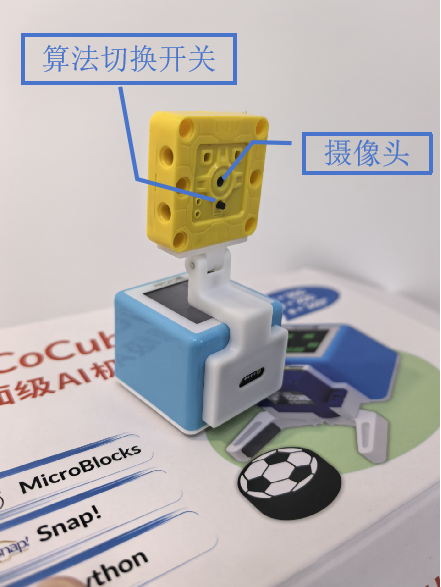
- Sengo 1 初始化积木
在使用 摄像头前需要先执行初始化积木。通常会放在"当启动时"帽子积木下。

- Sengo1 设置模式积木

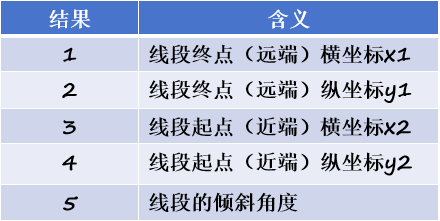
- Sengo1 线条检测对象属性

返回线条检测对象的属性,包括线段终点x1坐标(高处)、线段终点y1坐标(高处)、线段起点x2坐标(低处)、线段起点y2坐标(低处)、线段的倾斜角度。
使用技巧
背景与线条应清晰分明,比如白底黑线,如果背景杂乱,则可能会检测出背景中的线条
线条粗细应适中,不可过细,也不可太宽
一般来说,巡线时,第一条线段始终为屏幕下方先发现的线段,然后是分支线段
5. 开始编程
连接设备:通过有线或者无线方式,连接 MicroBlocks IDE 与 CoCube 机器人,并将 AI 视觉感知模块拓展在 CoCube 机器人前方。
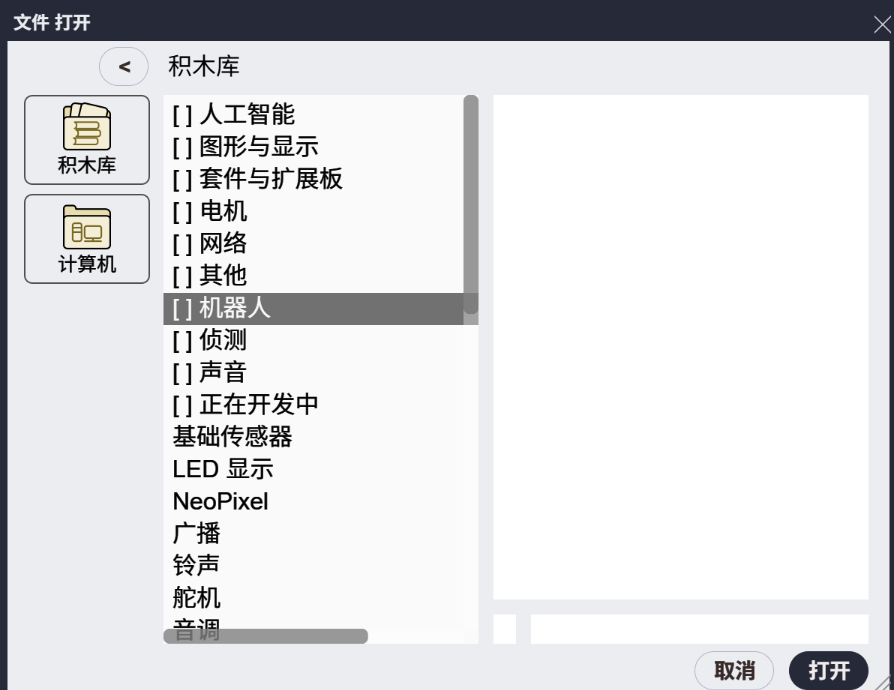
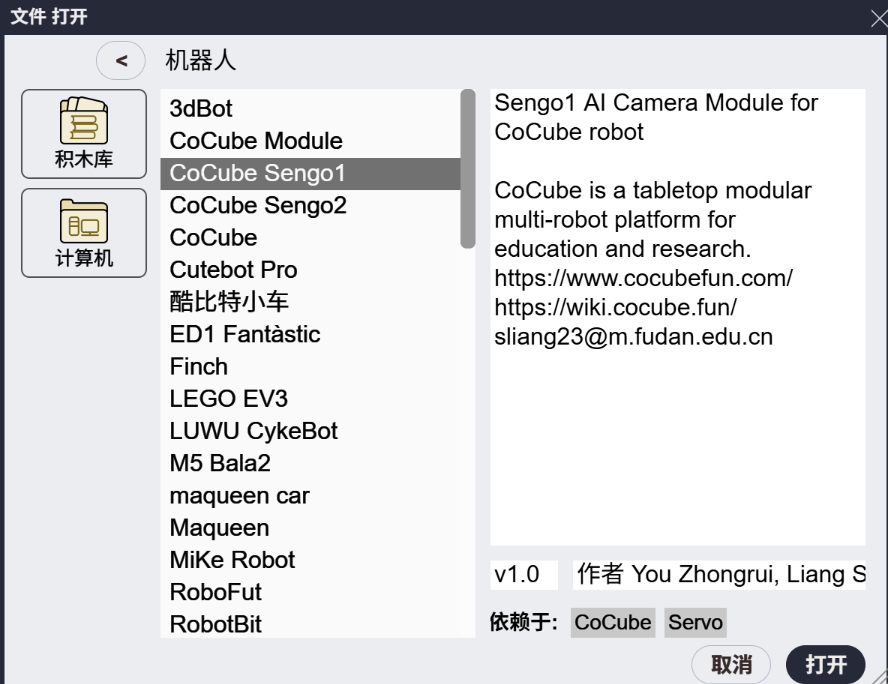
载入积木库:添加机器人积木库中的"CoCube Sengo1"或者"CoCube Sengo2",具体库的选择依据摄像头硬件型号,两者使用上无明显区别,Sengo2性能更好,以下案例教程以Sengo1库演示。
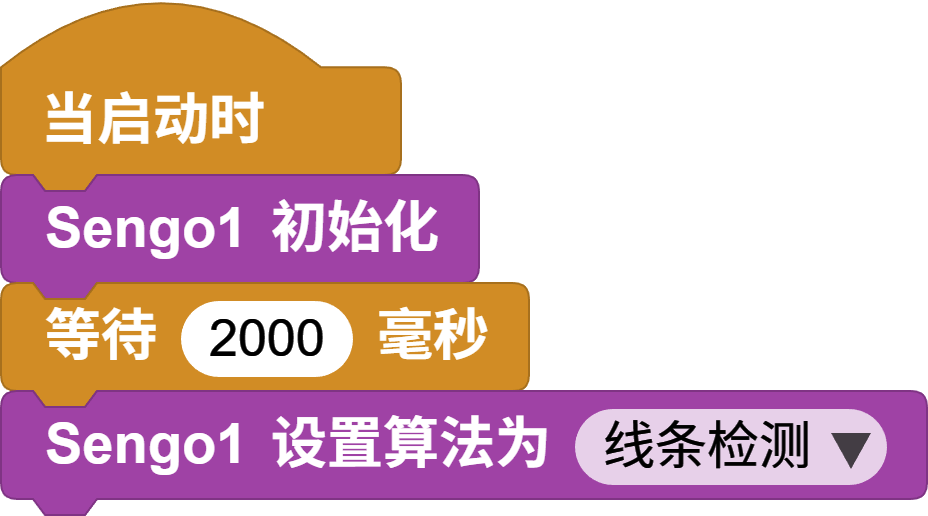
- 摄像头模块初始化:选择启动时先将Sengo1初始化,将摄像头的算法模式设置为线条检测模式。
- 线条检测:判断是否有检测到线条,当检测到时,输出该线条的5种属性。你可以实时观察该线条的位置与角度属性

现在考虑如何根据线条的位置和角度来让CoCube保持在巡线上,因为CoCube是履带式差速轮,当其偏离巡线时需要通过调整两个车轮的转速来进行转向校正。同前类似,这是一种负反馈控制。所以我们就需要判断什么情况下需要调整转向,如下图所示:
1. 首先当直线本身位置偏左时,说明此时CoCube已经偏向于巡线的右侧,而我们最希望的是CoCube能尽快回到最近的训线的中心,所以选择bottomX与屏幕中心(50)作差,然后除以一个比例系数得到差速值,定义为error1
2.其次当直线角度不是90度(即前方巡线存在拐弯)时说明我们需要进行转向来跟踪巡线。因此选择直角(90)与angle作差,然后除以另一个比例系数得到差速值,定义为error_2;
最终左轮的速度等于直线速度(默认25)+error1+error2, 右轮的速度等于直线速度(默认25)-error1-error2。
(注:这里error1和error2采用了负反馈的思想,根据实际的误差调整车轮转速,进而减少误差)

- 编写自己的程序:有了上述的调试代码,不妨尝试下改用其他参数作为负反馈项实现更高精度的跟踪,也可以自己试试组合更多的功能!
参考代码:案例 Sengo1 自动巡线
参考代码:案例 Sengo2 自动巡线