1. 案例目的
想不想让机器人学会“记路”和“自己再走一遍”呢?不知道大家有没有玩过“跟着脚印走回去”的小游戏,虽然听起来简单,却很考验机器人的“记忆力”。在本案例中,我们将通过编程让 CoCube 机器人自己记住走过的每一步路,并让它完整地重复一遍,带你体验从轨迹记录到路线回放的完整过程。
2. 使用材料

3. 软件平台

4. 理论小知识
需要使用到的积木说明:
- 列表积木:在“数据”积木库里,有一个叫 “列表” 的积木。刚拿出来的时候,它里面可能带着默认的内容“cat”。别担心!只要点击它左边那个灰色的小三角形,它就会变成一个空列表,就像一张干干净净的空白表格,等着你往里面填东西。


- 列表存储:有了“列表”这个“大仓库”,我们就可以把零散的数据信息整整齐齐地存进去、随时取出来啦!
不过,光有仓库还不够,我们还需要一个往仓库里放东西的积木。这个积木会把新物品自动放在仓库的最后面(就像排队一样,新来的站队尾)。
它有两个参数要填:
前一个空格:你要放进仓库的“东西”(比如一个数字、一个字母)。
后一个空格:你要放进哪个“仓库”(选择你之前创建的那个列表)。

PS:当看到这,尝试一下,将列表积木填入后,是不是会出现你想要的结果。
- 列表读取:当我们把东西整整齐齐地放进“仓库”之后,下一步最关键的是:怎么从某个位置把它再取出来用?
就像你在图书馆里放了一本书,想知道它在第几排第几格,然后把它拿回来。
这就需要用到另一个“读取积木”——它能帮你根据位置编号(索引),从仓库里精准地取出你想要的那一项数据

- 变量初始化:想让机器人记住一个数字、一个名字,随时都能拿出来用吗?那就得给它准备一个专属的小盒子——这个盒子在编程里叫做“变量”。
怎么找到这个小盒子呢?很简单:
先找到橙色的“变量”积木库。
在积木库的最左上角,有一个按钮叫 “新建一个变量”。
点击创建变量。

为了确保变量在使用前有一个确定的起点,我们通常会在创建时对其进行初始化。同时也需要在后续“值”发生变化时,对其进行改变。

局部变量初始化

变量设置
PS:局部变量,只在当前的积木块中有用。
- 仓库命名:如果直接把普通列表当作‘仓库’,会遇到一个棘手的问题:缺乏标签。试想,如果面前摆着两个一模一样的列表仓库,我们该如何判断数据究竟藏在哪个里面呢?因此我们可以借助变量来帮助我们给仓库命名。通过如图操作,我们就给我们的“目标仓库”取了名字“list_x”

5. 让机器人具备记忆能力
- 制作变量与仓库:为了让机器人能够有记忆能力,应该怎么做呢?
我们肯定要先给它设计一个存储记忆的地方,因此我们建立一个有名字的‘仓库’(列表),用于后续存放机器人的坐标数据。同时,引入一个索引变量作为‘账本’,时刻追踪仓库中存了多少个位置,让数目一目了然。

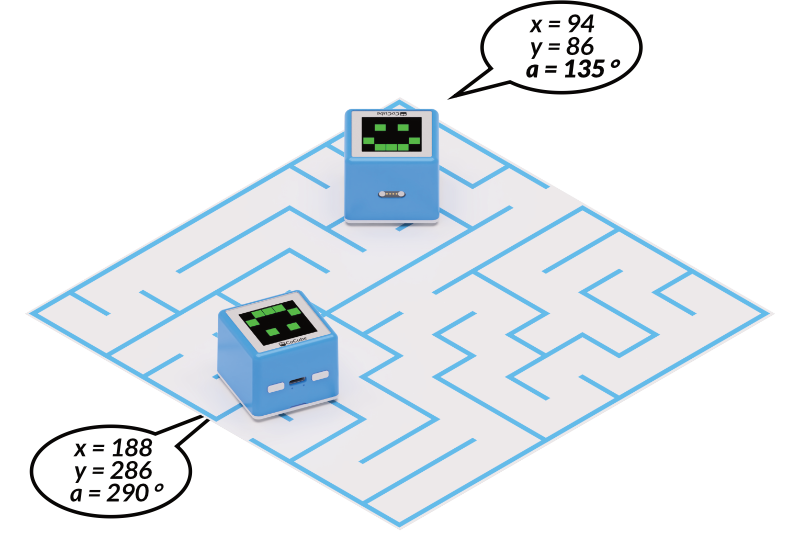
- 存储位置:接下来,我们就要把机器人走过的“足迹”(也就是地图上的 X 坐标和 Y 坐标)分别存进两个对应的列表里。这里有一个非常重要的小规则:
第 1 个 X 坐标必须和第 1 个 Y 坐标同时存储,第 2 个跟第 2 个,依次类推。也就是说,两个列表里相同位置上的数据要配对好,就像一双鞋子,左脚和右脚要对应上。这样才能保证我们后面取数据的时候,X 和 Y 不会“串位”。这么做的好处是什么呢?

我们知道,同一个点位的这两个坐标是同时出现的,我们把它捆绑在一起,所以我们可以把它们捆绑在一起来记忆,这样就不用分别记两个单独的位置啦,大大降低了记忆的难度。不需要再额外分别记忆两个的位置,这可以大大节省记忆的难度,就好像在你学习的时候是不是类似的东西,往往会联想到一块。

其实,我们还可以更进一步:把 X 和 Y 两个坐标直接“粘”在一起,当作一个点,整个儿放进一个仓库(列表)里。这样就不用分两个列表来记啦,一个列表就能搞定所有点的坐标,省心又省力!就像你把作业本和笔袋一起放进书包,不用分开找两次。
6. 实现记忆中的路径移动
- 路径复现:还记得以前学过的知识吗?只要告诉 CoCube 一个目标点的坐标,它就能又快又准地跑过去!
那么,想让机器人重复之前记忆的路,关键就变成了:把“仓库”里存好的坐标,一个一个取出来,再用“移动到目标点”积木,指挥机器人按顺序走一遍。路线就完整复现啦!
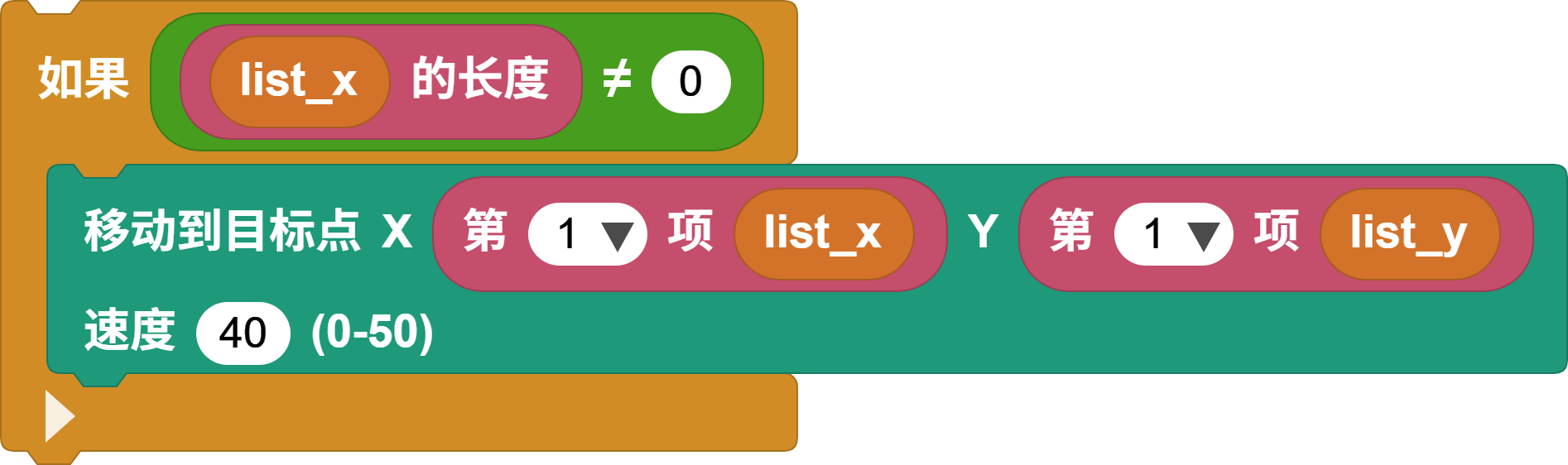
你看,这里我们取出的都是两个仓库里的第 1 项坐标——这正好体现了前面说的“坐标捆绑”:X 的第 1 项和 Y 的第 1 项是一对。
你可能会问:为什么是第 1 项呢?
答案很简单:因为我们是按顺序把坐标一个一个存进仓库的——先走过的路,就先存进去。
所以,第 1 项就是机器人第一个记下的位置,就像排队一样,谁先来谁排在最前面。
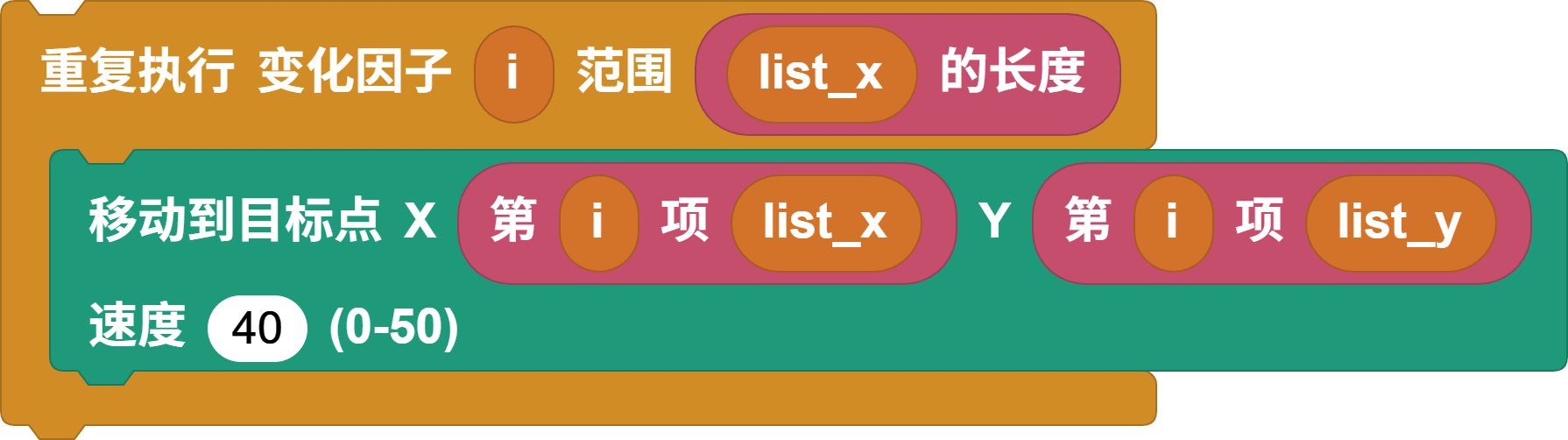
- 有没有想过接下来更多的坐标该如何实现复现呢?
熟练使用带“变化因子i”的“重复执行”的你,一定能快速想到,我们可以获取仓库的长度,并使用这个积木去逐项读取我们的坐标对不对?当然是可以的
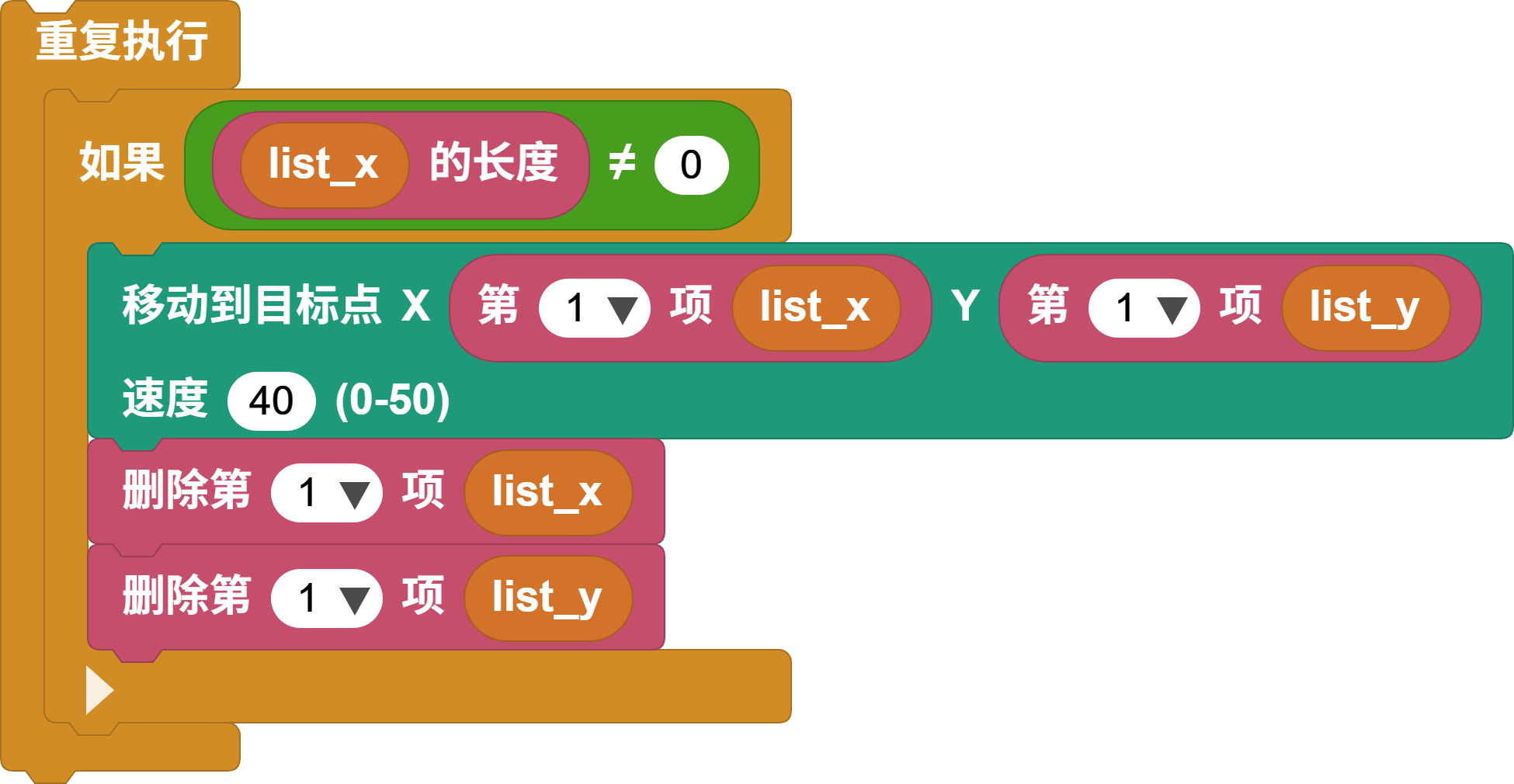
今天我们来学一种新方法,叫“边取边删”。什么意思呢?当我们从仓库里取出第 1 项坐标之后,这一项就已经用完了,不再需要了。那我们就干脆把它删掉!
删掉之后,原来的第 2 项就会自动往前移动,变成新的第 1 项。这样一来,我们每次只需要取第 1 项就行,不用费心去记“这次该取第几个”了。就像排队买东西,第一个人买完就走了,后面的人自然就站到了第一个位置。是不是很简单?这种方法下,我们的“列表”有一个专业的名词叫做“栈”的数据结构,先存储的先删除。
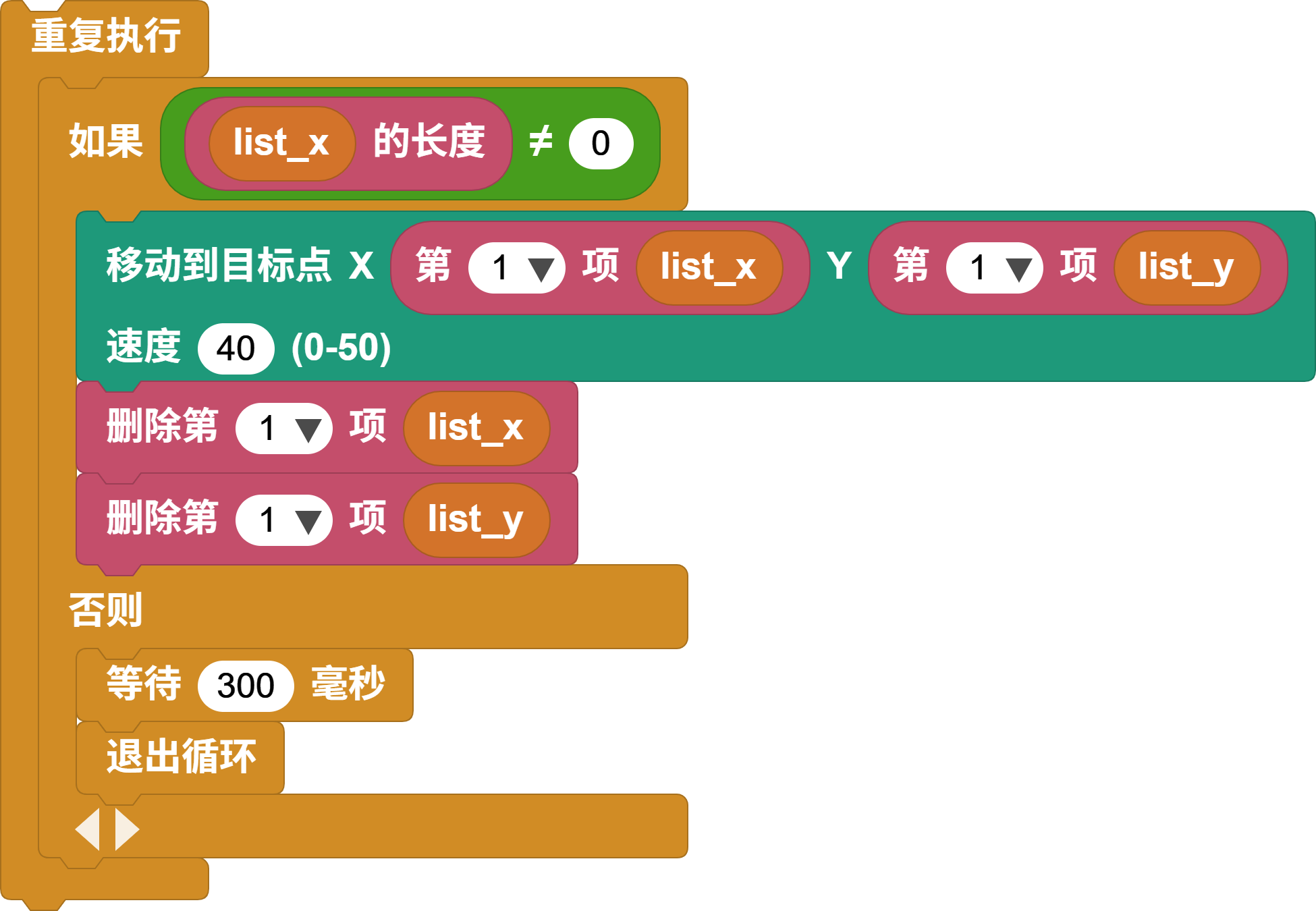
你可能会发现,如果一直“边取边删”,外面的那个“重复执行”就会没完没了地跑下去——就像一台停不下来的跑步机,永远不让你下来。这可不行!我们需要在合适的时候打断它。这时候就要使用 “退出循环” 积木啦!,这个积木需要你先打开设置里的“高级模式”,然后从“控制”积木库的最下方找到。
当然我们也可以使用,“重复执行,直到”积木来代替,这个“如果”+“重复执行”的组合:
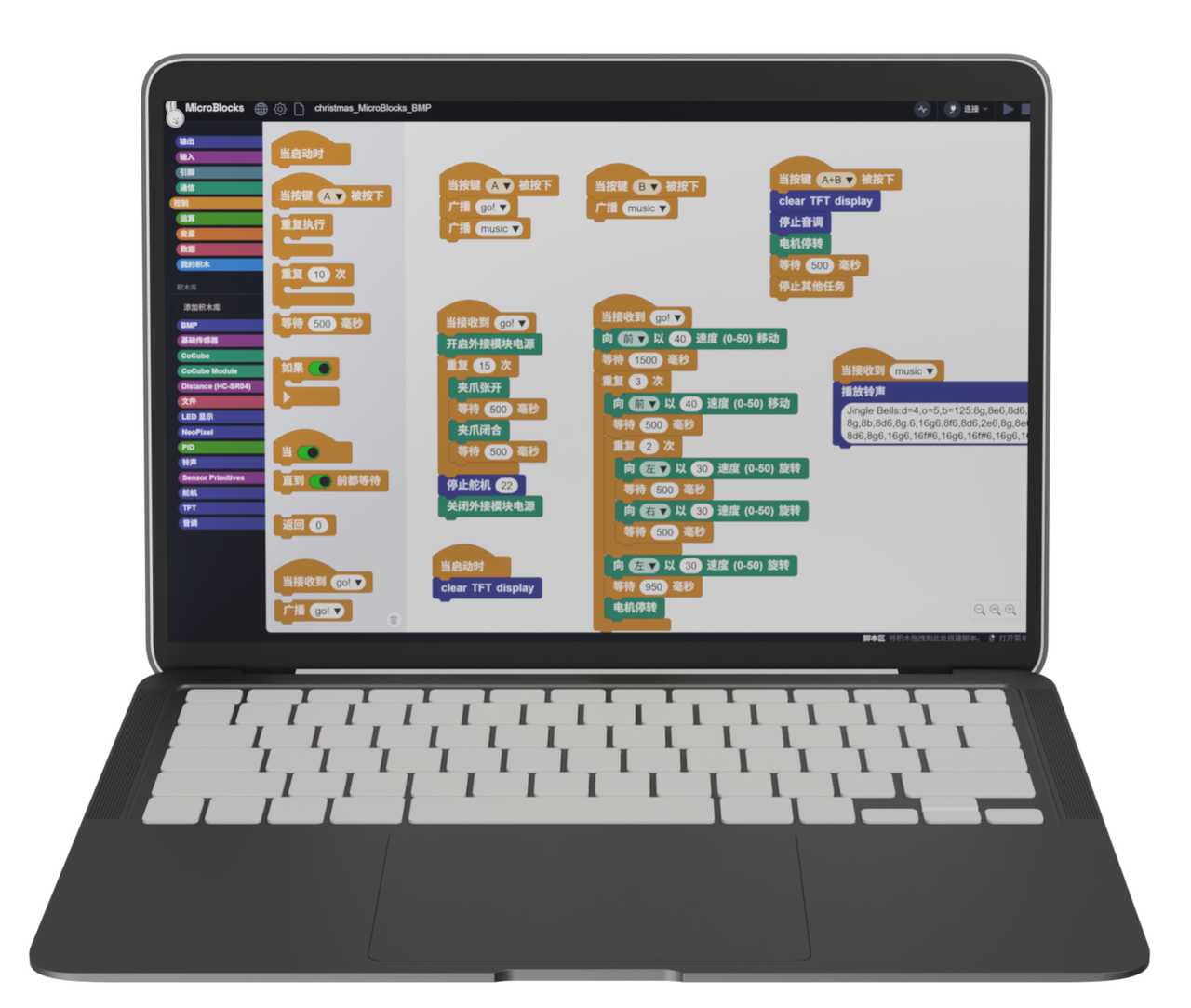
7. 操作指南
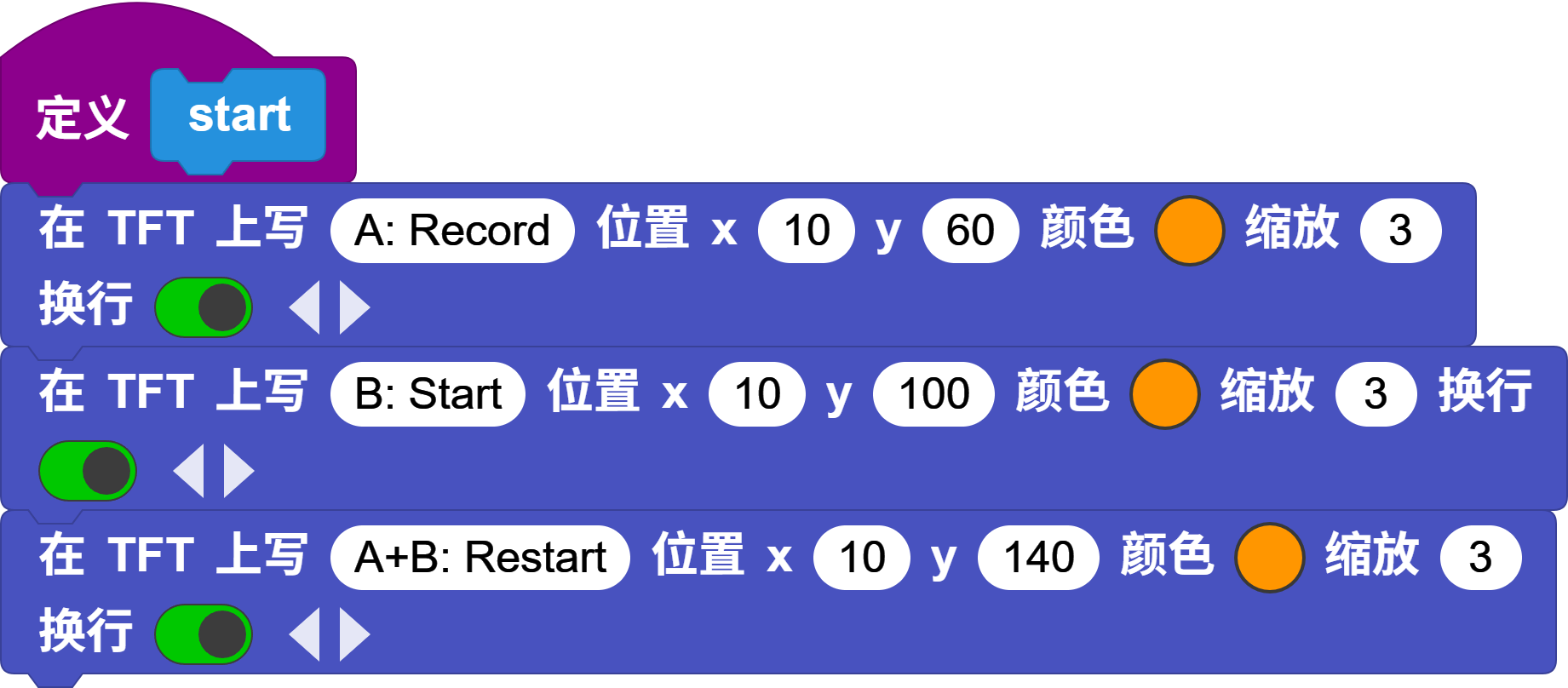
- 制作目录:为了让操作更一目了然,咱们可以先用 CoCube 自带的 “TFT” 屏幕把要用到的功能写在上面,就像游戏菜单一样,利用一个“start”自定义积木来完成该功能。然后利用 CoCube 机器人身上的实体 A、B 按键来指挥它:
按 A 键 → 机器人开始 “记录”(Record)自己走过的位置
按 B 键 → 机器人 “开始复现”(Start)之前存好的路线
同时按下 A + B → “重置”(Restart)清空所有存储的坐标,重新开始
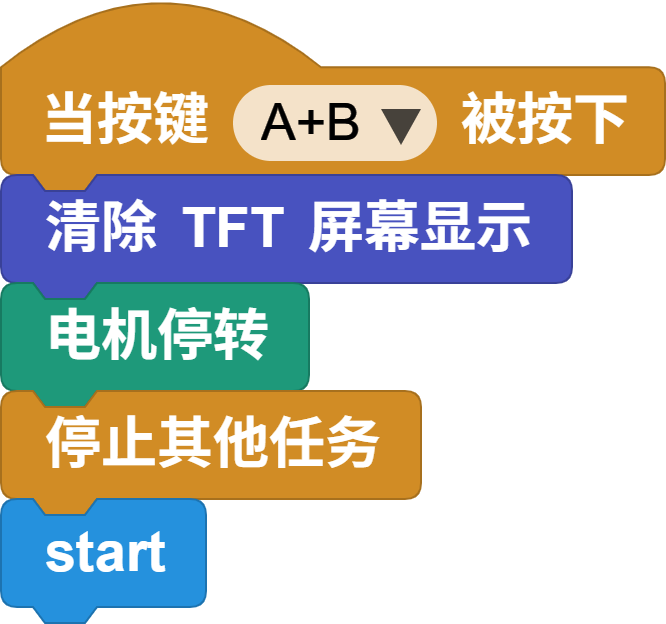
- Restart:如果前面采用的是“边取边删”的办法,那我们的“Restart”就可以非常简单,只用停止所有任务,重新回到目录界面就行。
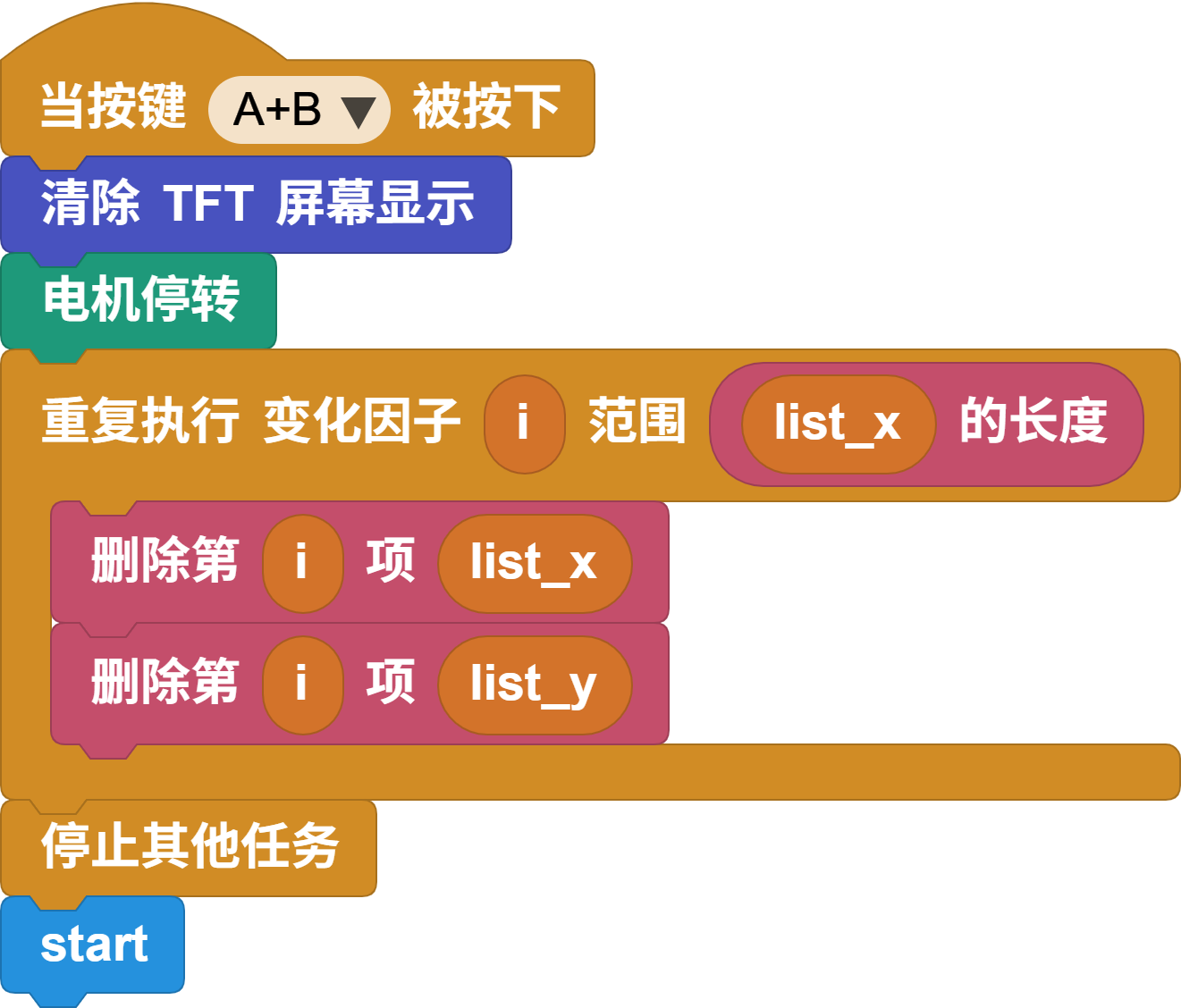
如果使用的是“带变化因子i的”积木,我们可以把删除记忆放在这里:
使用上述讲解过程实现机器人的位置存储与路径复现功能,结合“TFT”显示与音乐设计,使整个过程更有趣。